Hace alrededor de 30 años conseguí un viejo digitalizador de video para Amiga, y digo viejo porque ya era antiguo entonces. Desafortunadamente nunca pudimos lograr que capturara correctamente, por lo que siempre quedó la duda de si realmente funcionaba. Cómo lo conseguimos y por qué estuvo tanto tiempo guardado requiere un poco de contexto.
Con mi hermano comenzamos en el mundo amiguero en 1992 con una Amiga 2000, que no llegamos a expandir porque al año siguiente apareció la nueva Amiga 1200 con mayor potencia en todo sentido y expansiones más accesibles. Inmediatamente saltamos sin pensarlo al mundo de los gráficos AGA y de los 32 bits, y fue con esa máquina que empezamos a trabajar en video. Ya no recuerdo como terminamos trabajando en TV pero supongo que era inevitable, primero porque ya hacíamos gráficos con la Commodore 64, y segundo porque al estar lejos de todo, en la Patagonia, visitamos a cada usuario de Amiga que pudimos encontrar, que resultaron ser canales de TV o gente relacionada a la producción de video.
Ya que la Amiga era nuestra computadora principal y no teníamos PC, invertíamos todo lo que ganábamos en expandirla y en comprar soft, por eso es que cuando la máquina empezó a fallar pudimos comprar otra y mandar a arreglar la primera. Hay que tener en cuenta que estando lejos de Buenos Aires solo podíamos viajar una vez al año para comprar cosas, o como en este caso hacer reparaciones, por lo que a veces los trámites se hacían más largos. Un día pudimos traer la 1200 reparada pero lamentablemente volvió a fallar. Para entonces ya Commodore estaba en proceso de quiebra y varios negocios de Amiga estaban cerrando o empezando a trabajar con PC. Este era el caso con la gente que nos reparó la 1200, quienes nos dijeron que nos devolverían el costo de la reparación pero en hard y/o soft. Sabíamos que no habría otra oportunidad, por lo que elegimos unos cuantos programas y un digitalizador de video, porque el resto del hard eran expansiones que no podíamos usar en la 1200.
El digitalizador resultó ser un Diamond del año 1988 de la empresa Impulse Inc, la misma del programa Imagine para hacer diseño y animación 3D, muy conocido en esa época. Hasta el día de hoy no encuentro información y mucho menos un manual.
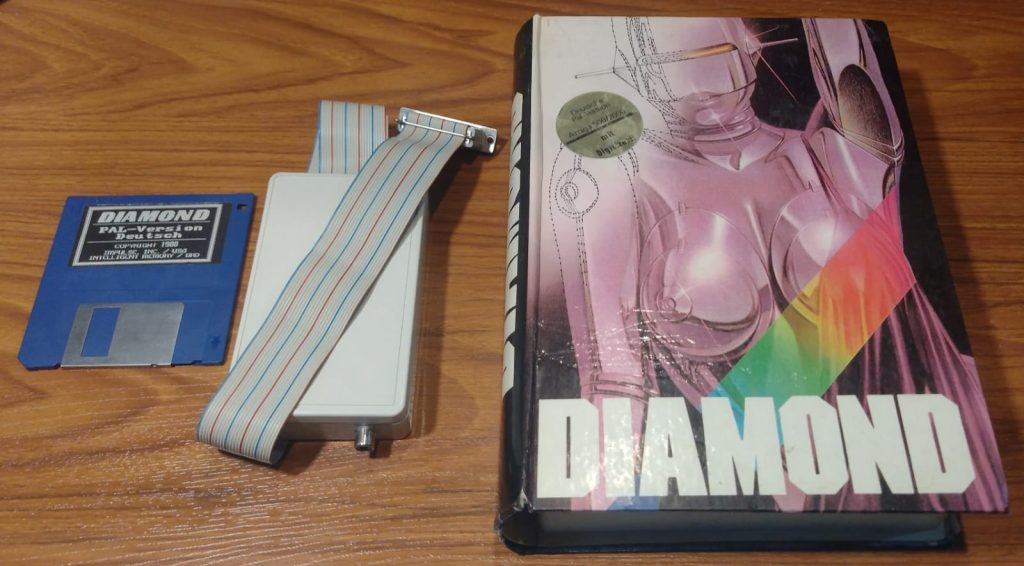
En el trabajo con video usábamos para las capturas un DigiView de NewTek, por eso nos pareció interesante probar otro digitalizador, pero resultó complicado porque el soft estaba en alemán, no parecía más potente que el DigiView, y las pocas capturas que logramos hacer salían mal. Así es que terminó guardado desde los 90s sin usarse, y aunque lo volví a probar un par de veces más, las imágenes resultantes nunca fueron usables.
Esta vez decidí volver a probarlo, investigué de nuevo sin éxito, y armé todo lo necesario para las pruebas con una Amiga 500, porque quería usarlo con lo que probablemente habría tenido un usuario de la época. La caja dice que el digitalizador es PAL, pero en mi Amiga 500 el programa solamente permite seleccionar modos de video NTSC y captura bien con ese tipo de cámara.
Para las pruebas usé una cámara NTSC con opción de video compuesto monocromático o color. Este tipo de digitalizador de video fue muy popular en Amiga porque se conecta al puerto paralelo y tiene una entrada de video compuesto, por lo que es compatible con todos los modelos de Amiga y con una gran cantidad de cámaras y equipos de video. Este digitalizador en particular al igual que el DigiView, solo ve video compuesto monocromático y hace una captura lenta. En estos digitalizadores se requiere que la imagen permanezca estable durante alrededor de 30 segundos, porque la captura se hace a lo largo de varios cuadros, lo que los hacía poco aptos para capturas desde fuentes inestables como los reproductores de VHS, que no podían sostener una pausa perfecta. Hubo después digitalizadores más avanzados que, aunque también se conectaban al puerto paralelo, capturaban un cuadro al instante para luego transferirlo a la velocidad del puerto.
Al arrancar el programa permite seleccionar la resolución con la que se va a trabajar, dentro de las limitaciones de los modos gráficos de Amiga, modos NTSC en este caso.
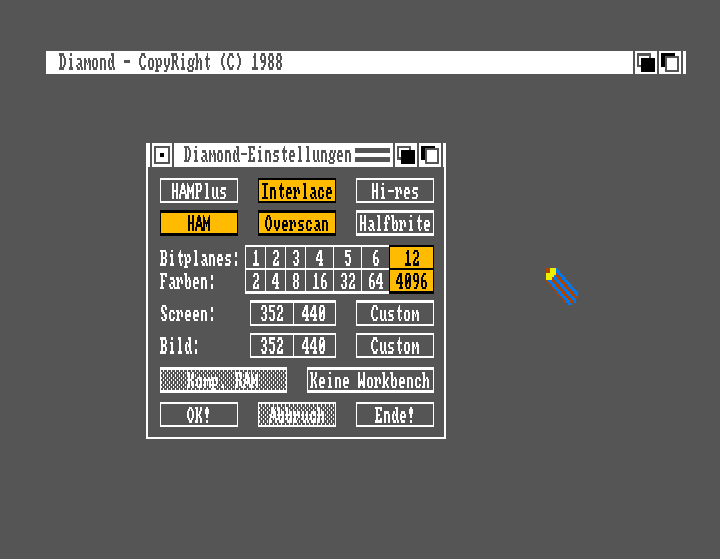
La primera prueba fue capturando una imagen en blanco y negro, pero en modo HAM de baja resolución entrelazada con overscan (352×440). La imagen resultante tiene una calidad aceptable, aunque con un poco de ruido, pero al usar el modo HAM está limitada a baja resolución horizontal.
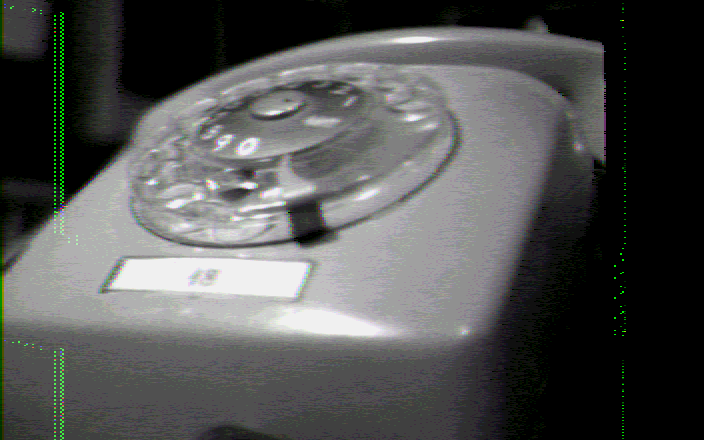
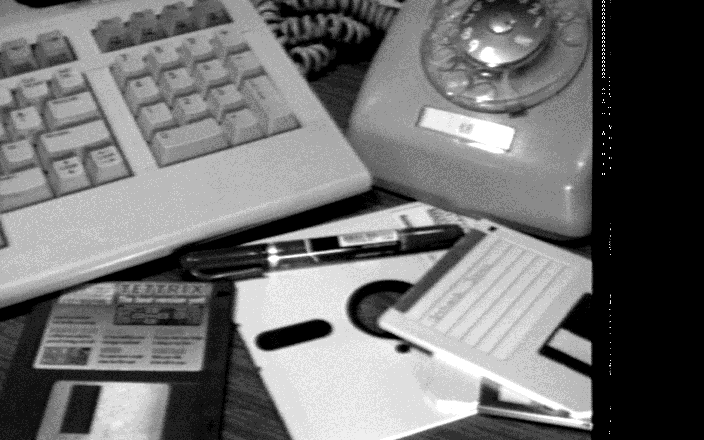
Con esta prueba se comprobaba que el digitalizador capturaba correctamente, pero era más interesante obtener una resolución similar a la que lográbamos con DigiView, por lo que esta vez procedí a capturar en alta resolución entrelazada con overscan (704×440) y en 16 tonos de grises.
La imagen resultante tiene una paleta incorrecta, como ocurrió las pocas veces que lo probé en los últimos años.
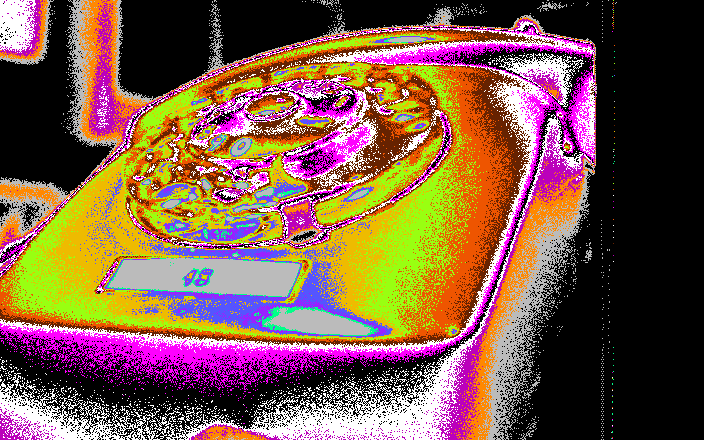
Se me ocurrió que tal vez no era un problema de la imagen sino de una paleta mal inicializada, así que cargué la imagen en un graficador, generé una paleta con 16 tonos de grises, y mágicamente se normalizó la imagen. Resulta que el digitalizador siempre anduvo y pasé 3 décadas sin usarlo solo por ese detalle.

Una vez resuelto el misterio decidí probar el viejo método de captura de imágenes en color usando filtros delante de la cámara, algo que solo una vez en los 90s intenté hacer con DigiView sin lograr buenos resultados. Ya que no tuve cámara de video hasta los 2000s no pude volver a hacer ese experimento.
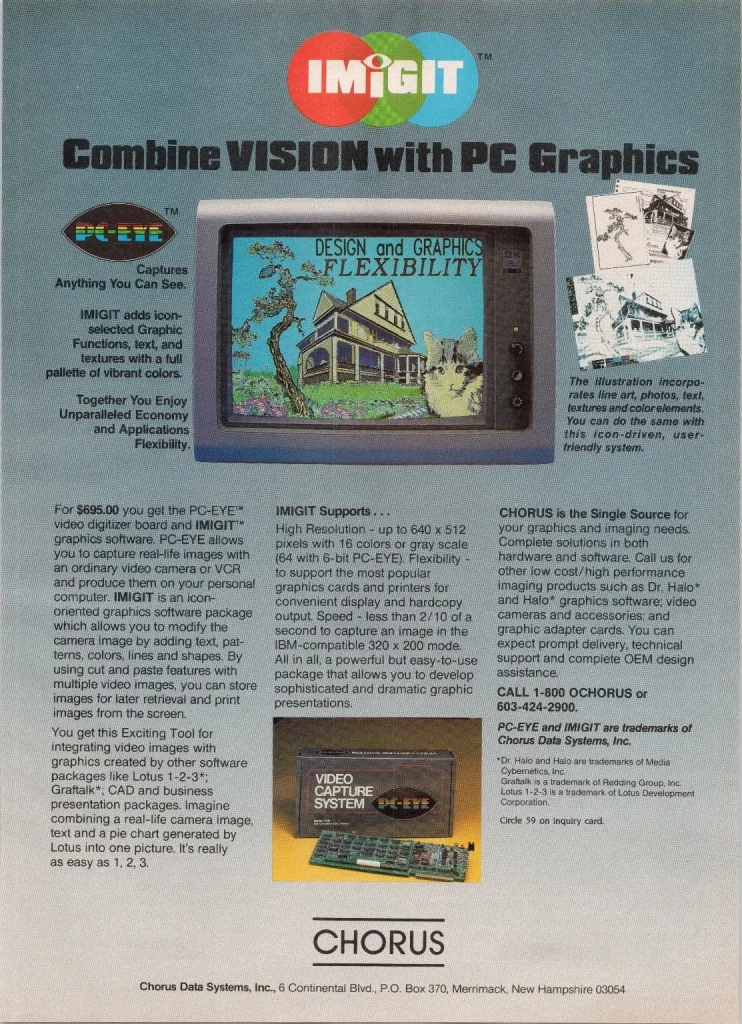
La cámara que usé para las pruebas también tiene una historia interesante, la compré hace como 20 años y venía con un módulo RGB conectado que proporciona 4 salidas RCA: video compuesto mono o color seleccionable con una llave, video rojo, video verde y video azul. Las salidas RGB aparentemente no tienen el sincronismo, por lo que por el momento no serían usables. Investigué en su momento y no pude encontrar detalles, pero ahora encontré que parece ser una cámara JVC GXN8U modificada en fábrica eliminando el visor y algunos controles, y fue vendida por la empresa Chorus Data Systems, supongo que como una cámara recomendada para su digitalizador de video color IMIGIT PC-EYE para PC, del año 1984.
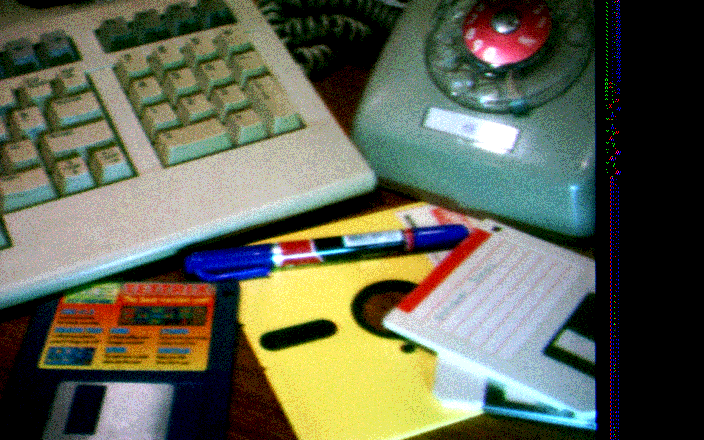
Siguiendo con las pruebas, decidí hacer primero la digitalización en HAM, pero esta vez había que hacer 3 capturas: una usando el filtro rojo, otra usando el filtro verde y una última usando filtro azul. Los filtros de colores que utilicé son los que venían en la caja del DigiView.

El programa permite capturar en blanco y negro (S/W) o hacer la captura de cada componente (rojo/Rot, verde/Gruen o azul/Blau), actualizando la imagen a medida que se captura. Hay que colocar cada filtro de color delante de la cámara y luego digitalizar la componente correspondiente hasta finalizar la captura completa.

La imagen obtenida sale un poco oscura porque no tengo buena luz, y tiene ruido propio del modo HAM, un modo gráfico que está mejor preparado para imágenes con transiciones suaves de color.

Como comparación, acá se puede ver la misma escena pero capturada en alta resolución entrelazada con overscan (704×440) y usando 16 tonos de grises:
HAM tiene color pero también tiene baja resolución horizontal, mientras que en alta resolución solo podemos capturar en tonos de grises, por eso decidí hacer una combinación de ambos métodos de captura. La idea era hacer una captura en alta resolución entrelazada por cada componente RGB, usando en cada una el filtro del color correspondiente, y luego procesar estas 3 imágenes en Amiga o en PC para obtener la imagen color. No encontré como hacerlo con Amiga (tengo ADPro 2.5) pero sí pude recomponer la imagen en PC usando GIMP.
No está mal para hardware del año 1988. Sería interesante ver lo que puede hacer con buena iluminación y una cámara mejor.
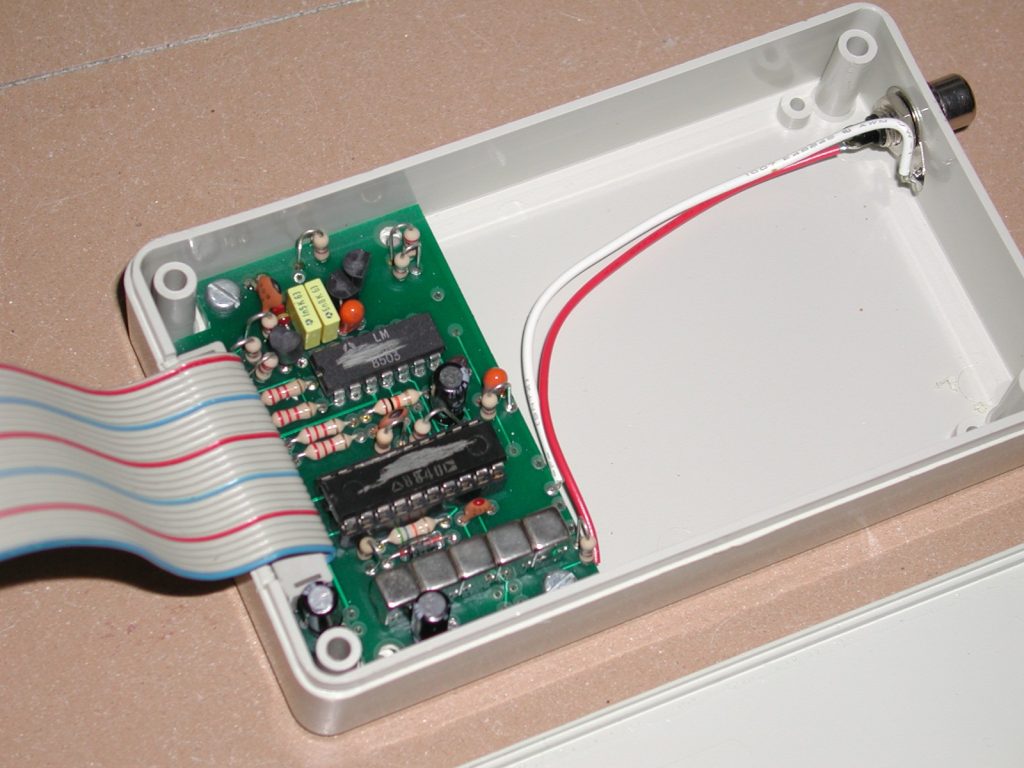
A diferencia del DigiView, que viene sellado y no se puede abrir sin romper la carcasa, el Diamond se puede abrir fácilmente, pero para compensar borraron el nombre de los chips, una práctica común en la época para evitar la copia del hardware.
Para terminar, dejo unos videos que hice con las distintas pruebas de captura.
Digitalizador de video de 1988 en Commodore Amiga 500:
Digitalización de video en color con Amiga 500:
Digitalizador de video para Commodore Amiga: