Hubo un tiempo en el que FIFA no era solo fútbol. Era una historia. No una historia de marketing ni de estadísticas. Era una historia de personas, de vínculos rotos, de decisiones incómodas y de segundas oportunidades. Una historia imperfecta, limitada, pero profundamente humana. Esa historia se llamó The Journey.
Hay juegos que uno espera. Hay juegos que uno persigue. Y después está GTA IV, ese que aparece cuando tu vida ya no es la misma que cuando jugabas de madrugada con unos auriculares rotos… pero todavía necesitás que un juego te diga algo.
Porque GTA IV no te abraza: te confronta. Te exige. Te hace mirar cosas que las versiones más jóvenes de nosotros apenas entendían.
Y ahí, cuando Liberty City se abre entre la neblina, te agarra algo en el pecho. Ese recuerdo de cuando los videojuegos no eran servicios, temporadas, cosméticos ni “pay to win”. Eran historias. Eran sensaciones. Eran refugios.
Hay juegos que uno busca. Y hay juegos que te encuentran. ARC Raiders me encontró así: un viernes a la tarde, con ganas de desconectar. Le escribo a un amigo y me dice: —Mati, ¿lo tenés? Está buenísimo para jugar en equipo.
Yo, gamer +40, ya sé cómo funciona esto: te tentás, te ilusionás, sacás la tarjeta… y después te arrepentís cuando llega el resumen. Pero igual lo hice, porque hay impulsos que a cierta edad ya aprendimos a no resistir.
Y así entré a un género que jamás había tocado: un extraction shooter. Sin armas. Sin experiencia. Sin reflejos competitivos. Sin saber ni cómo abrir el inventario.
Ahí empezó algo que —te juro— no esperaba sentir en 2025: un juego online que habla bien de la gente.
La pregunta es mucho más profunda de lo que parece
Hay preguntas que parecen simples, pero esconden bastante más de lo que dicen. Y una de ellas es esta: ¿por qué jugamos retro?
¿Por qué, teniendo miles de títulos nuevos, mundos inmensos, gráficos que parecen cine y consolas que hacen magia, seguimos volviendo —una y otra vez— a juegos de hace 20, 30 o 40 años?
La respuesta fácil sería: nostalgia. Pero la nostalgia no explica todo.
El dedo acusador apuntaba a esas portadas donde las modelos parecían de otro planeta: pieles sin poros, cinturas imposibles, sonrisas congeladas. La palabra Photoshop se volvió sinónimo de trampa, de mentira visual. “Todo retocado”, decíamos, con una mezcla de burla y alivio.
Nos reíamos de las celebridades que necesitaban un diseñador para parecer bellas. Nosotros, los mortales, aún conservábamos el consuelo de la autenticidad. Pero el tiempo, como siempre, tuvo otros planes. Acompañame en este viaje.
Por cierto, por acá podés escuchar la versión podcast de la nota:
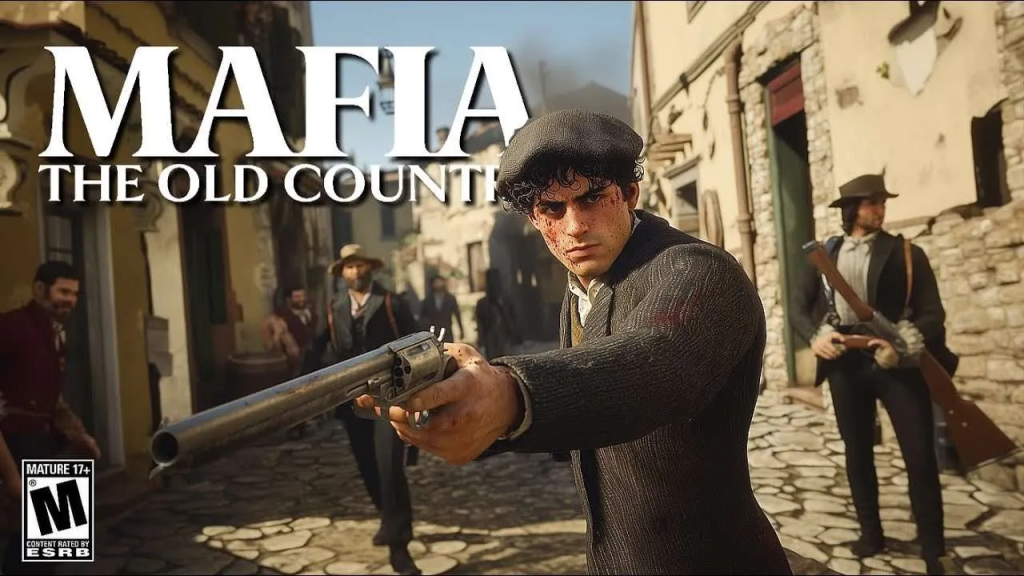
Hay sagas que se vuelven parte de uno. Que dejan de ser simplemente videojuegos para transformarse en capítulos de una historia personal, en compañía silenciosa durante madrugadas largas o en esas tardes donde la nostalgia se mezcla con el olor del mate.
Mafia siempre fue una de esas sagas. Y con Mafia: Old Country, 2K Games acaba de recordarnos que los buenos relatos —los verdaderos— no mueren: se reinventan.
A veces pienso que todo empezó cuando tenía doce años, frente a una pantalla fosforescente que parpadeaba más que razonaba. No había conexión a Internet, pero sí una más profunda: la que se establece entre el jugador y un mundo hecho de comandos, verbos y objetos imposibles.“Usar pollo de goma con polea en cable”.
Esa línea, escrita con la solemnidad de quien invoca un hechizo, me abrió la puerta a una lógica que hoy reconozco como mi primer prompt engineering practice.
Mi historia con Commodore comienza allá por 1985. Viviendo en Comodoro Rivadavia (a 2000 km de Buenos Aires), resultaba IMPOSIBLE conseguir cualquier tipo de material para la máquina. Aclaración: una vez, en unas vacaciones en Buenos Aires, mi tío Pablo me mostró una 128 con tres juegos: Aztec Challenge, Ace of Aces y Summer Games. Ahí me volví, literalmente, loco. yo venía de jugar en una Coleco Vision y una Commodore 64 en casa de mi amigo/hermano de la vida Ignacio aka Nacho. Amor a primera vista. Por supuesto: rompí el joystick, cortesía del juego de Epyx.
Ya de vuelta en Comodoro, mis padres me regalaron una Commodore 64c para mi cumpleaños. Se habían asesorado, y alguien les había dicho que la versión americana era mejor que la argentina (tópico para hablar en un próximo artículo). ¿El año? 1986.
Así, la máquina fue comprada en USA. La enviaron por barco. Tardó tres meses en llegar. Cuando finalmente la tuve en mis manos, la emoción pudo más. ¿El resultado? Humo gris por todos lados. Claro, el transformador era 110V. En Argentina usamos 220V. Comencé a llorar desconsoladamente. A esa altura, un negocio que reparaba todo tipo de electrodomésticos nos vendió la fuente a 220V. Ya era hora de empezar a usar la bendita máquina. Y ahí surgió el gran dilema: ¿dónde conseguir software?
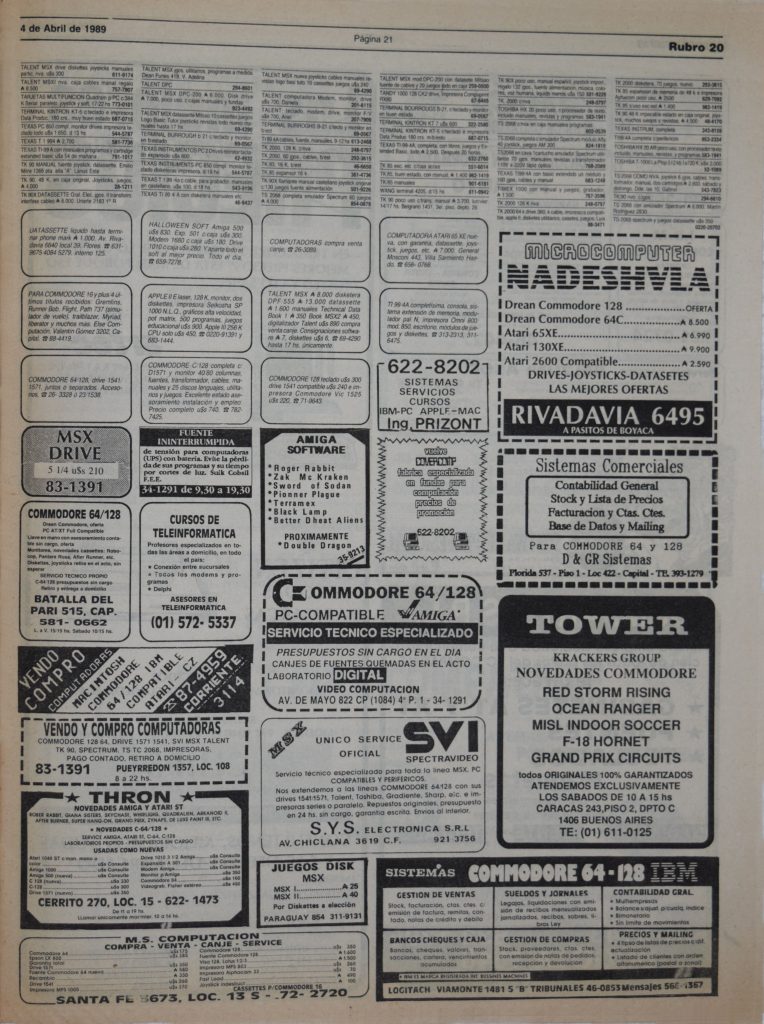
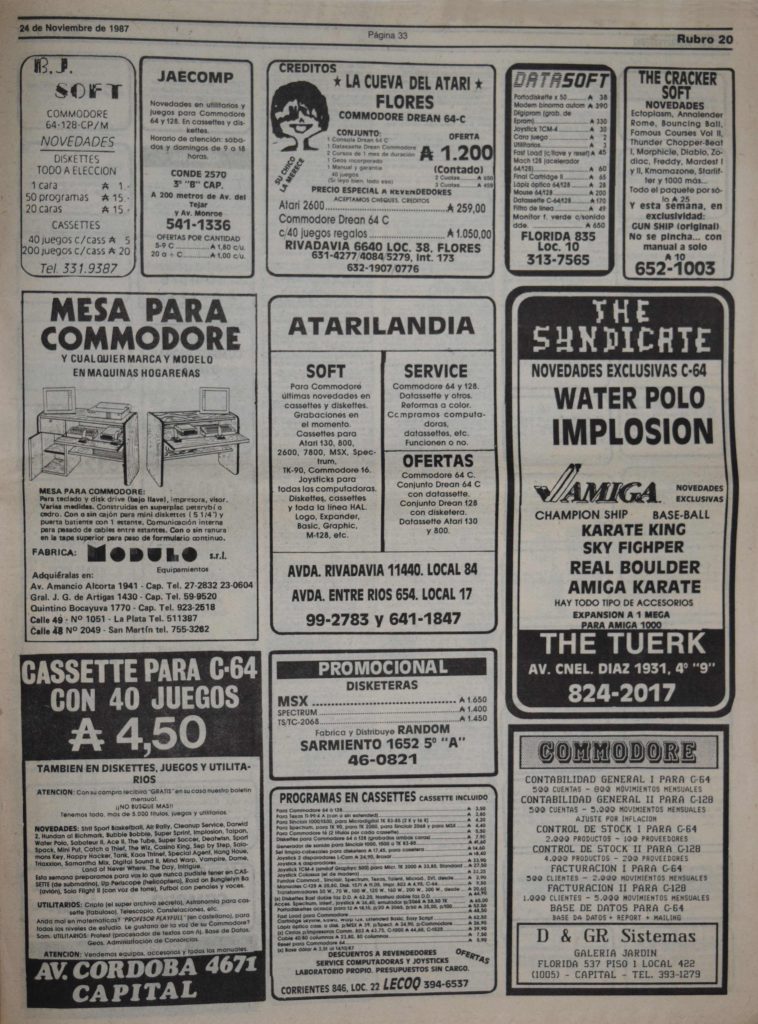
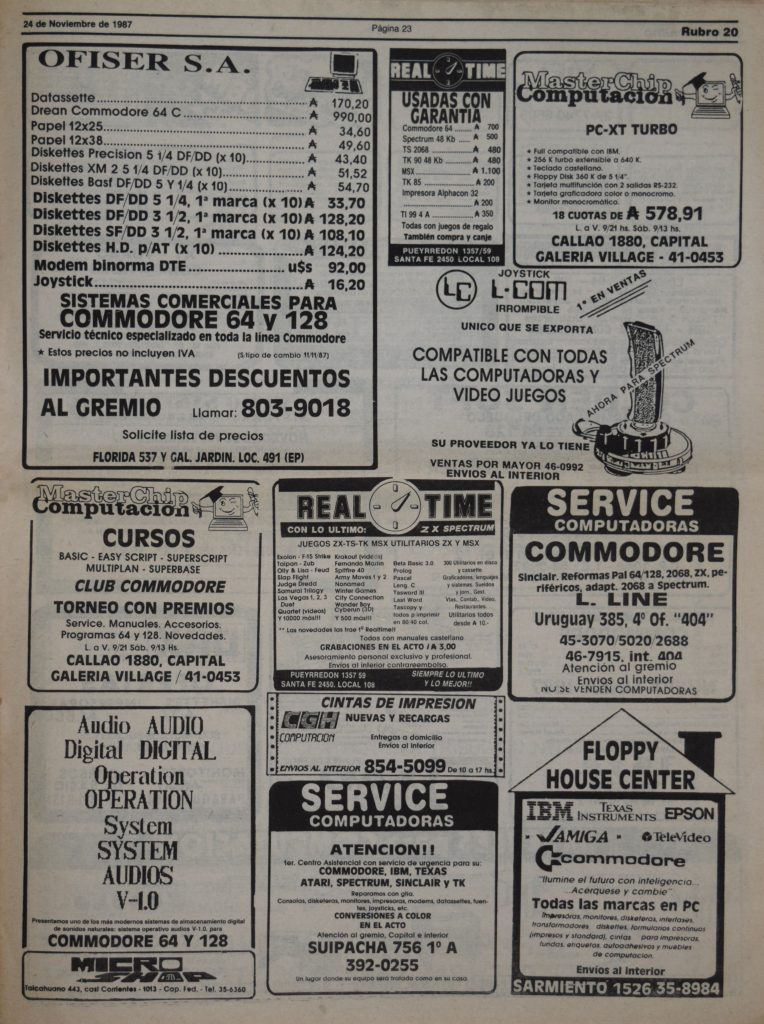
Un par de fines de semana después, jugando en casa de Nacho, se nos acercó su papá, el queridísimo Raúl. Traía una revista, similar a un periódico. Se llamaba “Segundamano”. En ella, se ofrecían todo tipo de compraventa, del rubro que pudieras imaginarte. Un rubro nos llamó poderosamente la atención: el 20, “Computación”. En el mismo, cientas de tiendas del rubro, ofreciendo reparación, asesoramiento técnico, venta de hardware y…software!!!! Así es, varias páginas de avisos de casas de computación, ofreciendo todas las “novedades” para Commodore, Spectrum, Atari y MSX. Con el correr del tiempo se sumarían Amiga, Mac y PC. Todo, absolutamente todo, era software crackeado. El 99% de las veces, venía de Europa. El 1%, de Estados Unidos. Por supuesto, muchas de estas casas de venta de hardware y software tenían algún que otro joven talentoso, quien a veces ponía intros/cracktros del negocio, a modo de “competencia”. Los mensajes consistían básicamente en reírse de la competencia, pues las novedades las tenían ellos en primer lugar, o bien mandar saludos a “amigos” de la escena.
¿Cómo llegaban los juegos a nuestro país? Gente que viajaba solía traerse muchas cajas con soft. O bien, los dueños de los comercios enviaban un sobre con dólares envueltos en papel de diario a los diferentes crackers. Y a cruzar los dedos. Al mes, si es que la Aduana no retenía el paquete por “sospechoso”, lo recibían con todas las novedades. Respecto al tema Aduana, existen muchos mitos y leyendas. Uno dice que se coimeaba al Oficial de Aduana de turno, llevándole una docena de golosinas, dulces, baguels.
Poco después, algunos valientes adquirieron modems y empezaron su aventura en los BBS. Y, por supuesto, se descargaban absolutamente todo lo que aparecía en pantalla.
Un problema surgió: aquellos que teníamos máquinas con la norma NTSC, teníamos dificultades para entretenernos con los juegos llegados de Europa. La solución más fácil era convertir la máquina a PAL-N, la norma argentina, diferente a la PAL que se utiliza en Europa. Pero los juegos andaban, no se colgaban. Unas pocas veces, se conseguían juegos con “fixes” a PAL-N, pero eran una rareza.
Cabe aclarar que en Argentina (y me atrevería a decir que en Uruguay, Paraguay, Chile, Brasil y Perú, por citar algunos países de la región) JAMÁS existieron los juegos originales. Ya de por sí, comprar una máquina era muy caro. El doble, incluso el triple de lo que costaban en Europa o Estados Unidos. Luego, esa diferencia de precios se achicó con la aparición de las versiones argentinas de la Commodore (Drean), MSX (Talent MSX), Spectrum (CZ Spectrum). También, material para otro artículo.
Volviendo a lo que nos interesa: “Segundamano” se editaba martes y viernes. El día que nos interesaba era el martes, pues ahí era cuando aparecían las publicidades. Imposible olvidarse de negocios como Realtime, Red Point, Bad Boy (Crackers Revenge) y muchísimos más. Estos tres que menciono, tienen de por sí una historia fascinante (sí, nuevamente, para otro artículo en el futuro). Esto no quiere decir que no aparecieran luego comercios en las principales ciudades del resto del país, donde casi siempre vendían el material que le compraban a los negocios de Buenos Aires.
Raúl, viajaba por trabajo dos o tres veces al mes a la Capital. Con Nacho, realizábamos una exhaustiva selección. Elegíamos 20/25 juegos y se los dábamos a Raúl en un sobre. El sobre contenía los recortes de Segundamano de los negocios dónde él debía ir y comprar los juegos que, previamente, habíamos marcado con lapicera. Era una peregrinación que valía la pena, al menos, para nosotros. Buenos Aires es una ciudad muy grande. La recorrida podía ser agotadora. En cada local, podías estar tres, cuatro, cinco horas esperando a que te grabasen los juegos. Era un furor increíble. Muchísima gente ya tenía acceso a las home computers. Se podían comprar en grandes comercios en cómodas cuotas, se podían traer de afuera de “contrabando”, era todo un universo fabuloso.
Cuando Raúl regresaba, era una fiesta. Una fiesta que a veces podía demorar dos o tres semanas. La ansiedad era inevitable. Éramos chicos de 11/12 años. Nos juntábamos en su casa y, literalmente, pasábamos el fin de semana entera completamente focalizados en los juegos nuevos, en terminarlos, usando o no las delicias que le agregaban los crackers (vidas infinitas, tiempo ilimitado, etc).
Se preguntarán por el precio de los juegos. Tal vez haya sido de un centavo, o 5 centavos, o 10 centavos de dolar, al equivalente de hoy.
Con el correr del tiempo, empezaron a venderse los utilitarios: Print Shop, Newsroom, GEOS y todos sus accesorios. Y, por supuesto, no faltó la producción local de muchísimo hardware, ya sea desarrollado acá o clonado de algún producto foráneo. Así, empezamos a tener la versión local del fast load de Epyx, Final Cartridge, Logo, lápiz óptico, etc. Paralelamente, apareció software comercial: control de stock, software de gestión, horóscopo, todo hecho en Argentina, y en español, por supuesto.
Pero, aún existía un GRAN problema: ¿cómo hacer para no depender de Nacho? ¿Cómo podía yo tener mis propios juegos? La respuesta, apareció casi de manera lógica. Después de ir tantas veces a los mismos comercios a comprar juegos, uno empezaba a hacerse “amigo” de los chicos que grababan los mismos. Yo, en cada viaje de un amigo o familiar, aprovechaba para pedir mi lote. Obviamente, juegos distintos a los que tenía Nacho. Entonces, una semana yo tenía los de él y él tenía los míos. Luego, cada pack de juegos volvía a su dueño. Estos chicos solían trabajar a cambio de que les proveyeran de software, que luego vendían en otros comercios. En una oportunidad, le pregunté, a uno de ellos, haciéndome el desentendido, cómo hacían para copiar los juegos. Ahí escuché por primera vez una palabra famosa: “Fast Hack´em”. Sin dudar, le dije “quiero comprarlo”. El chico me miró, se rió y me dijo: “te va a costar una fortuna”. ¿Cuánto es esa fortuna? Aproximadamente el equivalente a 10 cajas de diskettes. Tuve que tomar una decisión casi drástica: o compraba 10 cajas repletas de juegos, o compraba EL software, el copiador. Tras meditarlo, compré el copiador.
Volví a Comodoro con un trofeo, una reliquia, una joya. Rápidamente, empecé a copiarme todo el catálogo de software de Nacho. Y le copíe todo el mío. En un comercio local, empecé a comprar cajas y cajas de diskettes. Había de todas las marcas, para todos los gustos: Damy, Maxell, 3M…
La noticia se fue expandiendo rápidamente. Tengan en cuenta que Comodoro, en esa época, tenía una población de alrededor de 100.000 habitantes. Así, empecé a copiar a mis compañeros de colegio, a amigos de mis compañeros de colegio, a sus amigos, a conocidos. Un día, le copié a Nacho y a otros amigos el bendito Fast Hack´em. El tesoro pasó a ser parte de la comunidad.
Pasó el tiempo y, en otro viaje a Buenos Aires, pude ver, casi de reojo, un monitor 1902 con una pantalla que nunca había visto: “Maverick”. Inmediatamente, pregunté qué era. La respuesta provocó en mí una sonrisa enorme. Era un gigante upgrade del Fast Hack´em. Sin dudarlo, lo compré. Con esto, subíamos varios peldaños: los juegos “imposibles” de copiar, ya estaban al alcance de todos.
Así transcurrieron los días en 1986, 1987 y 1988: se podía jugar cuando terminábamos de hacer la tarea escolar, o bien los fines de semana. Por supuesto, otros accesorios fueron agregándose a nuestros equipos, principalmente, la impresora. Empezamos a tener una excusa perfecta para usar nuestras Commodore en cualquier momento: podíamos imprimir material para la escuela, banners, carteles, monografías. Incluso, hacer lo más parecido a una revista de fin de año.
Paulatinamente, surgió otro furor: las máquinas de 16 bits. Esta, ya es otra historia.
¿Tenés un celular o tablet viejo juntando polvo? ¡No lo tires! Puede que ya no funcione como antes, pero eso no significa que esté listo para el retiro.
Nota por Matías Guala (@matias_guala)
Con un par de ajustes, podés transformarlo en un reproductor multimedia ideal para ver pelis, series y hasta canales de TV. Así de fácil: lo que parecía un trasto olvidado puede revivir como un centro de entretenimiento portátil, y hoy te mostramos cómo.
En esta ocasión vamos a estudiar uno de los grandes deseos que surgieron en los 80 para usar al máximo la Commodore 64, El Brazo Robot
Vamos a estudiar que hacía, como funciona por dentro, que circuitos tenía y cómo lograr conectar una Commodore con un circuito casero que vamos a diseñar para que funcione nuestro brazo Robot.