Hola Bienvenidos a esta nueva serie sobre la 20C, una computadora modular de arquitectura simple diseñada desde cero para aprender y hacer experimentos.
Vamos a ver juntos cómo aprender más fácil cómo funciona una computadora en profundidad, cómo programarla en assembler y que pasa eléctricamente en la misma con cada línea de nuestros programas.
El inicio de una pequeña gran historia. Fue en 1961 que comenzó el proyecto Ceuns (Computadora Electrónica de la Universidad Nacional del Sur), ideado por el ingeniero Jorge Santos, con el objetivo de construir una computadora realmente operativa para la Universidad Nacional del Sur (UNS), situada en la ciudad de Bahía Blanca, y que pudiera luego ser transferida a la industria nacional.
Durante la década anterior, numerosos centros académicos de varios países se habían planteado proyectos similares para construcción de computadoras. En Argentina surgieron dos: el Ceuns y el Cefiba (Computadora Electrónica de la Facultad de Ingeniería de la Universidad de Buenos Aires).
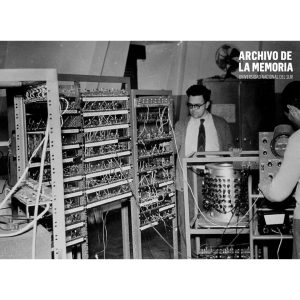
El Ingeniero Jorge Santos trabajando con la Computadora Electrónica de la Universidad Nacional del Sur (CEUNS), año 1962.
Pero vayamos un poco más atrás en el tiempo para saber el origen del proyecto. En octubre de 1960 Santos había logrado, por intermedio del rector de la UNS, que la Legislatura de la Provincia de Buenos Aires votara un subsidio destinado a la construcción de una computadora, además del compromiso formal de participación del Departamento de Matemática.
Es que Santos ya venía trabajando en el diseño de su proyecto durante su estadía en la Universidad de Manchester, donde colaboró en el desarrollo del proyecto Atlas (la primera computadora a transistores que produjo la empresa Ferranti). La pretensión de construir una computadora en la remota Bahía Blanca se sostenía en la convicción, compartida por Santos y un grupo innovador de la UBA, de la necesidad de promover la independencia tecnológica como pilar del desarrollo económico y social del país, y en una serie de condiciones favorables, tanto técnicas como académicas y políticas.
El año 1960 fue clave en la introducción de la computación en Argentina. IBM presentó el modelo 305 y poco después instaló una IBM 650 con sistema de discos Ramac en su data center y colocó otra máquina en la empresa Transportes de Buenos Aires. En noviembre llegó la Ferranti Mercury para el Instituto de Cálculo creado en la Facultad de Ciencias Exactas de la UBA. En ese mismo año, Ferrocarriles Argentinos había recibido dos equipos Univac SS-90 con la nueva tecnología de estado sólido.
Fue en la UBA y la UNS, escenarios destacados de la renovación universitaria, donde se promovieron los primeros desarrollos de la computación en Argentina. La construcción en el país de una computadora pequeña de costo limitado parecía un objetivo loable y alcanzable.
Jorge Santos se había graduado en la Facultad de Ingeniería de la UBA, donde había trabajado hasta 1953, cuando su contrato no fue renovado por no estar afiliado al partido gobernante, como le sucedió a otros docentes, entre ellos Manuel Sadosky. Y fue gracias a la influencia intelectual de Sadosky que conoció el nuevo fenómeno de la computación y fomentó su idea de construir una computadora. Sadosky le había dicho a Santos: “tenemos que hacer una máquina; con menos cantidad de válvulas, pero hay que hacerla”.
La experiencia de Santos en Manchester fue posible gracias a la creación del CONICET, presidido por el doctor Bernardo Houssay, en donde una de las primeras actividades fue la de otorgar becas de perfeccionamiento en el exterior a las nuevas camadas de investigadores de las universidades. Santos, que luego de la UBA se había mudado a Bahía Blanca para trabajar en la UNS, fue seleccionado y viajó en agosto de 1959. Su tema de estudio fue “Diseño lógico en computadoras digitales”.
La Universidad de Manchester tenía una alianza con la empresa Ferranti, fabricante de la Mercury, la computadora adquirida por el Instituto de Cálculo de la UBA. Por fortuna, la estadía de Santos coincidió con el diseño de la Atlas, la sucesora de la Mercury, en el cual Santos participó en el equipo desarrollando el algoritmo de división.
Tiempo después, cuando Santos regresó a Bahía Blanca, tenía entre manos un proyecto elaborado y sustentable. Sabía que para concretarlo necesitaría dinero y un equipo de trabajo que incluya programadores, ingenieros y matemáticos. Con la conjunción de tres aspectos favorables (el entusiasmo de la comunidad científica argentina, la existencia de un proyecto sólido y un ambiente político favorable a la inversión tecnológica), la Legislatura provincial votó un subsidio de 100 mil dólares para la concreción material de la Ceuns, que iba a ser desembolsado en cinco cuotas correspondientes a los años programados para la finalización del proyecto. En el presupuesto provincial de 1961 se incluyó la primera cuota de 20 mil dólares.
Todo estaba en marcha. Una breve caracterización de la Ceuns apareció en el Boletín de la Sociedad Argentina de Cálculo, donde se mencionó la construcción de un computador de bajo costo en el que sus códigos de operación y forma operativa estén basados en la Mercury. La Ceuns contaría con una memoria de trabajo, acceso inmediato a núcleos magnéticos de 64 palabras de 36 bits dividida en 4 páginas. Esa memoria sería ampliada con otra, también con acceso inmediato a núcleos magnéticos, de tipo fijo. Los datos e instrucciones serían mantenidos en un tambor magnético de 9000 palabras y desde allí transferidos por páginas a la memoria de trabajo. El programa sería secuencial. La entrada sería por medio de un lector de cinta de papel y la salida por un perforador de cinta o por una máquina de escribir.
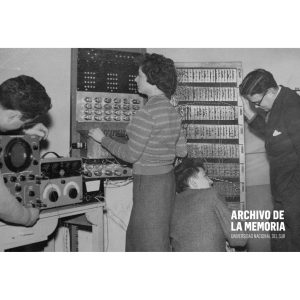
Alumnos y docentes trabajando con la Computadora Electrónica de la Universidad Nacional del Sur (CEUNS), año 1962.
Sin embargo, a partir de agosto de 1961 comenzaron las dificultades. El gobierno de la Provincia de Buenos Aires libró una orden de pago por un monto de 1.300.000 pesos moneda nacional, equivalente en ese momento a 15.711 dólares. El pago no se efectuó, al menos no en el corto plazo, y Santos tuvo que solicitar a las autoridades de la UNS un adelanto de 20 mil pesos para no paralizar el proyecto. El adelanto fue otorgado, y el pago estatal finalmente se hizo efectivo, pero fue lo único que se percibió del subsidio.
Más tarde, en marzo de 1962, una crisis política desencadenó la intervención federal a la Provincia de Buenos Aires, e incluso la disolución de su Poder Legislativo. Ese hecho, si bien no implicaba la derogación de lo aprobado anteriormente, hizo que las relaciones de representación política y el marco ideológico que había posibilitado el logro de ese apoyo financiero, se quebraran.
Aunque en octubre de 1962 se pudo inaugurar un componente periférico que servía para paliar la carencia de una computadora en la UNS, para marzo de 1963 el proyecto no infería ningún avance sobre la situación del año anterior. Al no existir el subsidio del Estado, el trabajo continuaba al ritmo de los escasos aportes del CONICET o del presupuesto universitario. El equipo humano se redujo a tres personas con dedicación plena, hasta que durante 1965 el proyecto se fue apagando hasta ser definitivamente clausurado.
De acuerdo con los planes originales, la máquina debía entrar en operación en marzo de 1966 pero, salvo los periféricos inaugurados en 1962, no había más que partes sueltas. Las penurias materiales de las universidades nacionales fueron determinantes de unas demoras de gran magnitud en el plan del proyecto, y a eso se le sumó la discontinuidad en la fabricación de los componentes de hardware que se había decidido utilizar. El atraso y la falta de perspectivas pusieron en cuestión el sentido de continuar el esfuerzo, lo que selló el fracaso del proyecto.
Analizando los motivos de su final, la causa directa fue la aguda falta de recursos humanos y materiales debida, más que nada, a un cambio de las condiciones políticas, una circunstancia que convirtió al proyecto en patrimonio exclusivo de un pequeño grupo de desarrollo, solo constituido por ingenieros electrónicos. Por otra parte, entre su formulación y su abandono se había producido un cambio de foco en el diseño de las computadoras con la incorporación de componentes de software.
Años más tarde, a principios de la década de los 80’s, se constituyó en la UNS un área de docencia e investigación en informática, con protagonistas que no habían experimentado los problemas de los proyectos anteriores, y Ceuns fue ignorada como antecedente en las unidades académicas.
En retrospectiva, el proyecto Ceuns fue uno de los episodios iniciales de la computación en Argentina, ocurrió en la UNS y se intentó la construcción de una computadora con un objetivo que iba más allá del académico. Sucedió justo en un período de transición entre el surgimiento y cierta consolidación de la tecnología.
Como balance, puede señalarse la formación de una tradición en Electrónica en la UNS, la interacción con los matemáticos que dio sustento a la constitución de la actual escuela de docencia e investigación en computación, y los desarrollos pioneros en software “de base” creados en el proyecto.
La historia de la Ceuns, poco conocida y por demás interesante, no deja de ser inspiradora.
(*) el presente artículo está basado en el paper “Fulgor y ocaso de Ceuns. Una apuesta a la tecnología nacional en el sur de Argentina”, autoría de Rául Carnota y Ricardo Rodríguez, y publicado en “Historias de las TIC en América Latina y el Caribe: inicios, desarrollos y rupturas”, capítulo 9, editada por Ariel y Fundación Telefónica (España) en 2015.
Cual es el punto para desistir en la reparacion de una Commodore Amiga, habiendo ya tan pocas disponibles a la venta y cual es el punto entre costo hundido y pura nostalgia insistidora para llegar a puerto?
Amiga 600 en su estado final
Comienzo del viaje
En los hobbies no hay ningun criterio unificado, solo puntos de encuentro de algunos intereses comunes, en mi caso soy un gran aficionado de las microcomputadoras Commodore (si, el formato todo en el teclado). En este hobbie queres ir consiguiendo esas maquinas, ya sea funcionales o por reparar, la lista se va completando y siempre queda la figurita dificil, la Amiga 600.
Un poquito de historia
Como algunos conocen, Commodore como tantas otras empresas de computadoras, tuvo su primer traspie en los 80, donde muchas otras empresas lucharon por permanecer como es el caso de Apple. Commodore sobrevivio pero continuo con algunas malas decisiones desde el punto de vista de los negocios y algunos aciertos, como fue el caso de adquirir en 1984 a Amiga Inc. Esto dio luz a una de las computadoras mas innovadoras en su epoca, la Amiga 1000 y al mejor exito comercial que fue la computadora hogareña Amiga 500 en 1987. Luego de este exito salio la Amiga 500+ que poseia pocas mejoras como 1Mega de fabrica en vez de 512 y abaratamiento de costo de fabricacion y de premio algunas incompatibilidades no comunicadas en su release.
En paralelo se trabajo en lo que seria una version economica (que nunca lo fue salvo en la calidad de terminacion de su PCB) la cual contaba con PCMCIA y disco rigido, la intencion fue llamarla A300 pero por su costo final se termino llamando A600, su procesador era el mismo que el de la A500 pero en vez de formato PDIP era un PLCC, un Motorola 68000 a 7.16Mhz
Fue la mas limitada e incompatible de las AMIGAs en su epoca por los cambios en su Kickstart 2.0 y por tener un teclado reducido, pero la mas buscada en la actualidad.
El regalo
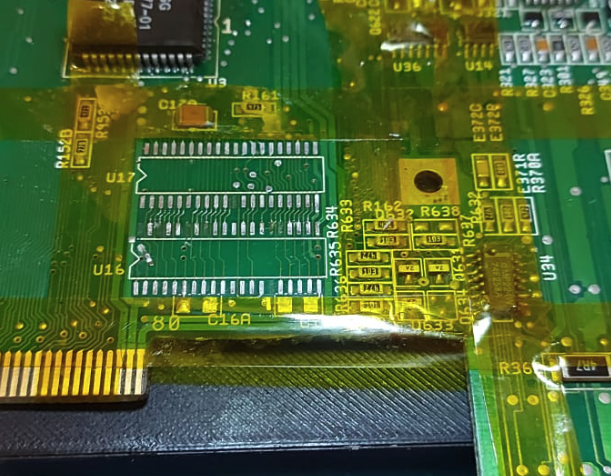
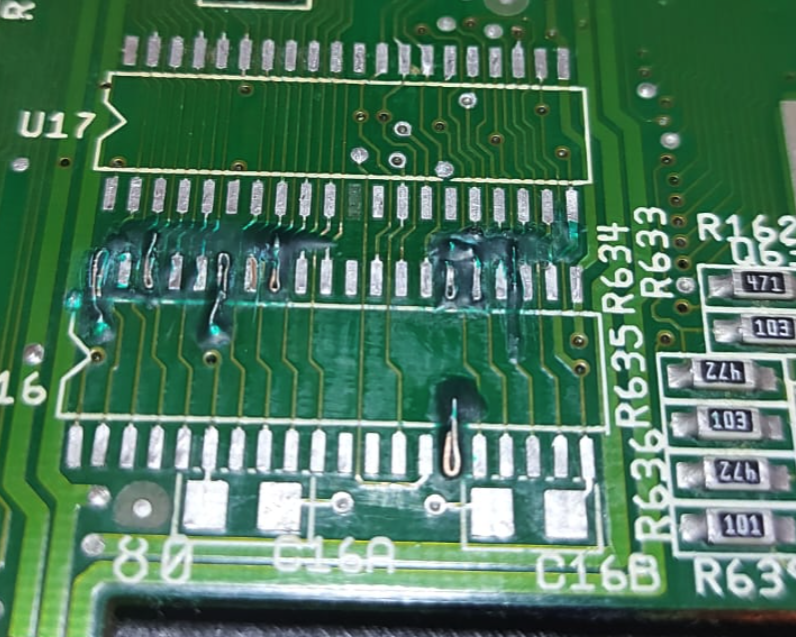
Aproximadamente en junio de 2022 un gran amigo Francisco Manera me comenta que a sabiendas de mi interes por una A600 me regala una marcada “irreparable”. Esta se habia enviado a revisar por un gran experto en Argentina (Otto) y el tiempo que habia que dedicarle y el daño que le habia hecho el que la intento “recapear” la habian dejado en condicion de muerta. Cosas inentendibles como poner capacitores TH (thru hole) donde van SMD, pistas cortadas por doquier al querer soldar, resistencias quebradas. Dejo unas fotos pero no son para gente sensible.
En el proceso de reparacion se retiraron todos los componentes TH que no lleva y se repararon pistas rotas, el lugar que mas desafios dio fue debajo de los PLCC y las memorias RAM.
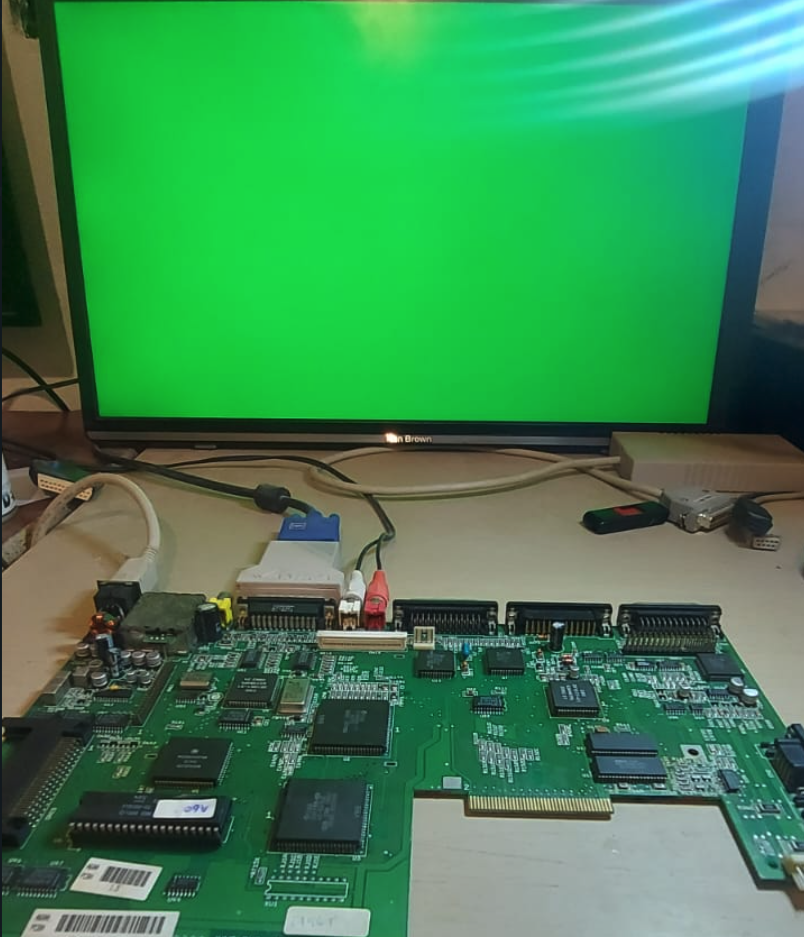
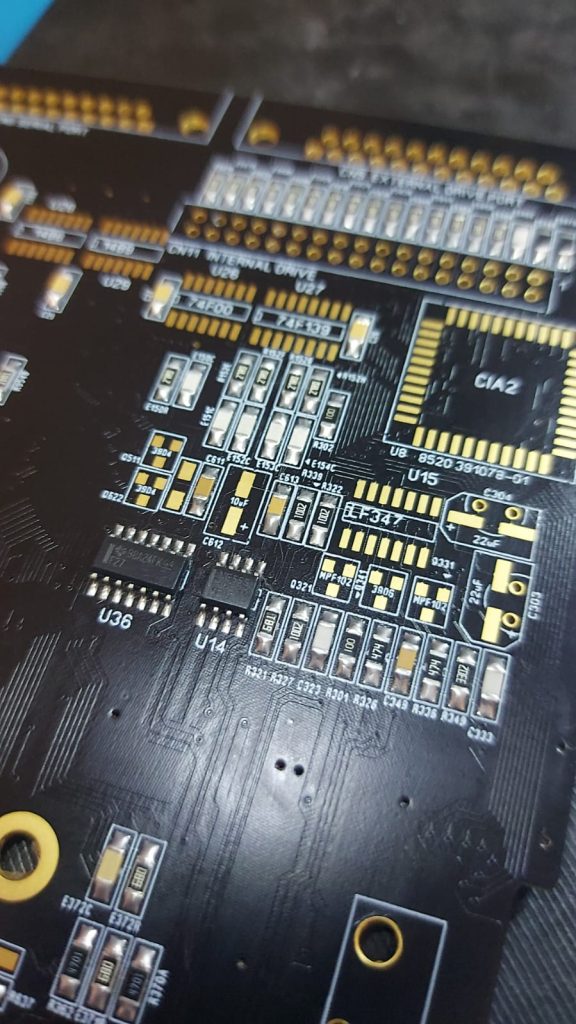
En un punto se logro que la A600 arranque por tan solo unos minutos, primero con pantalla verde (problemas de memoria) y despues arranque completo. Claramente algo en la placa hacia calentar a uno de los custom chip principales (Gayle / Denise / Agnus) y el sistema moria.
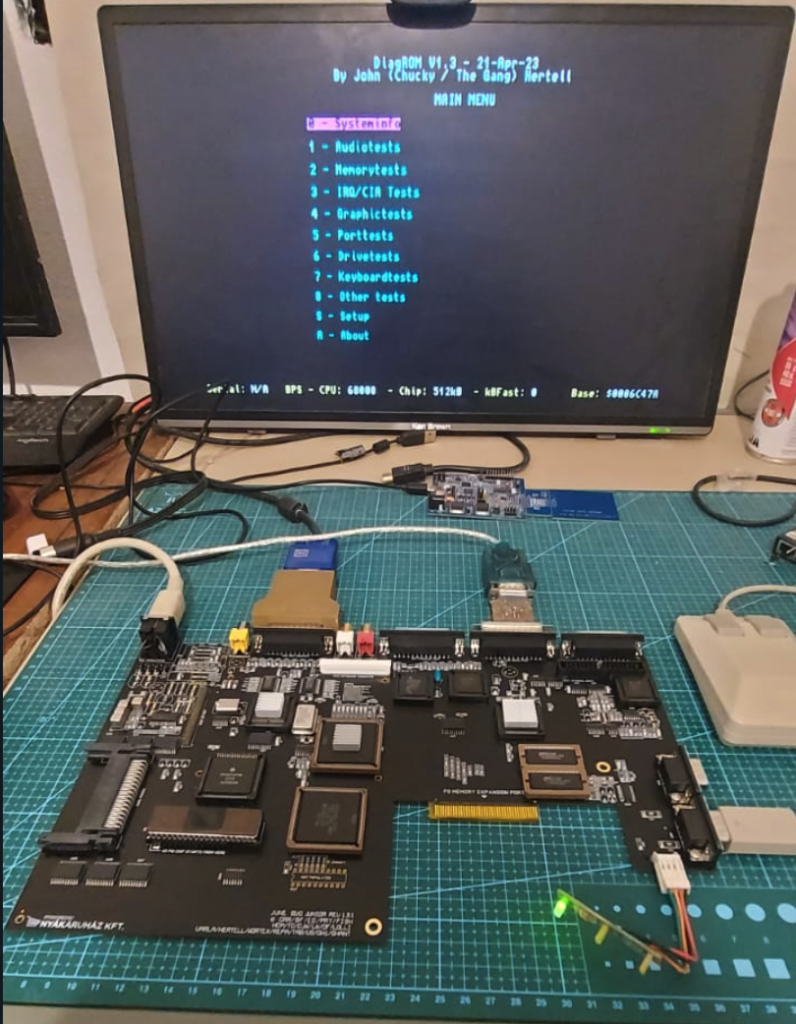
Se utilizo el DiagRom de John Hertell que en un punto mostraba que la memoria era leida correctamente, pero en un punto se detectaba una instruccion erronea y el sistema se detenia.
Cambio de estrategia
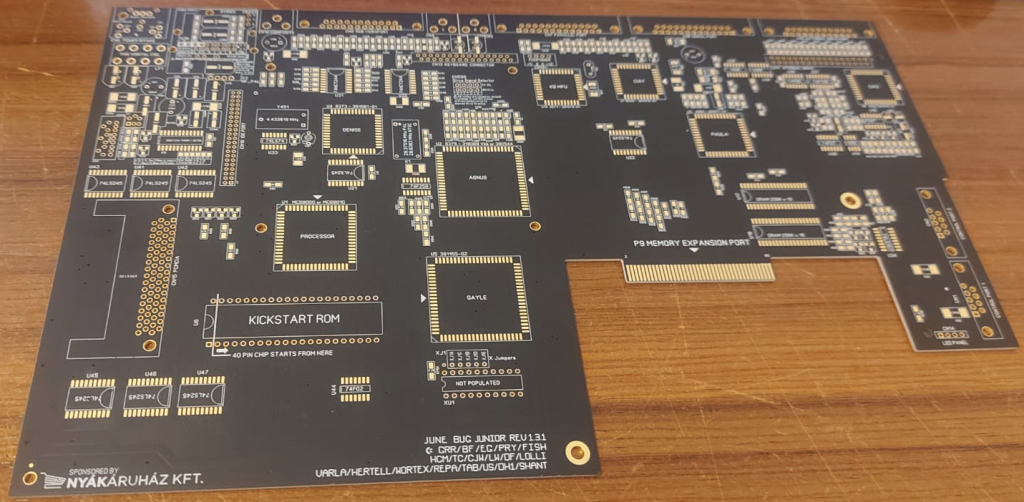
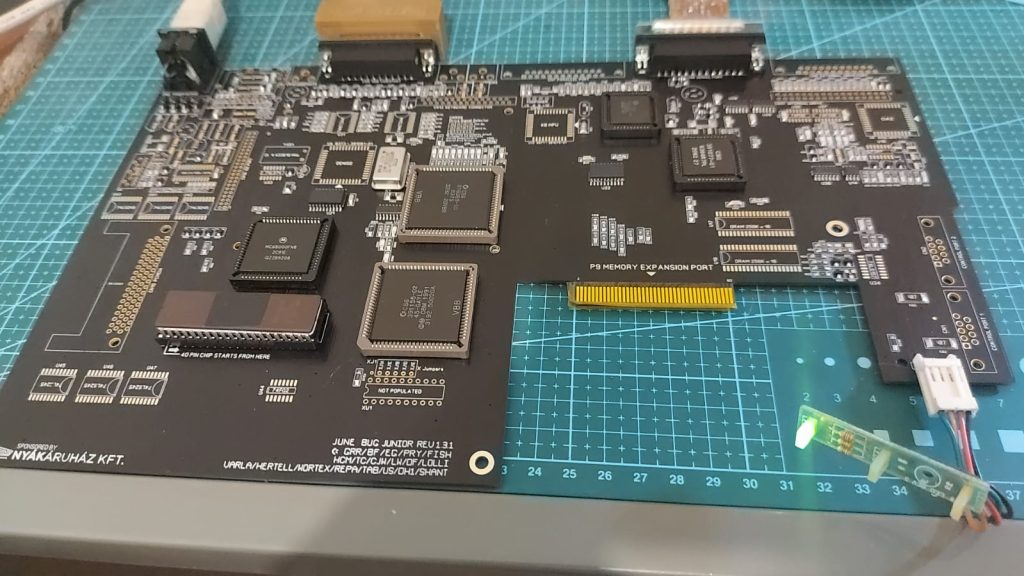
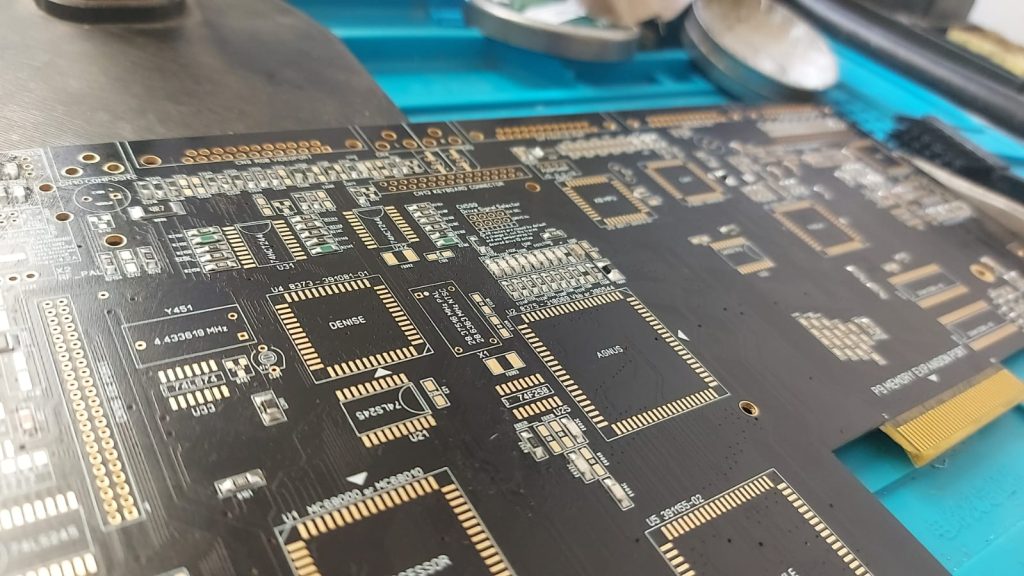
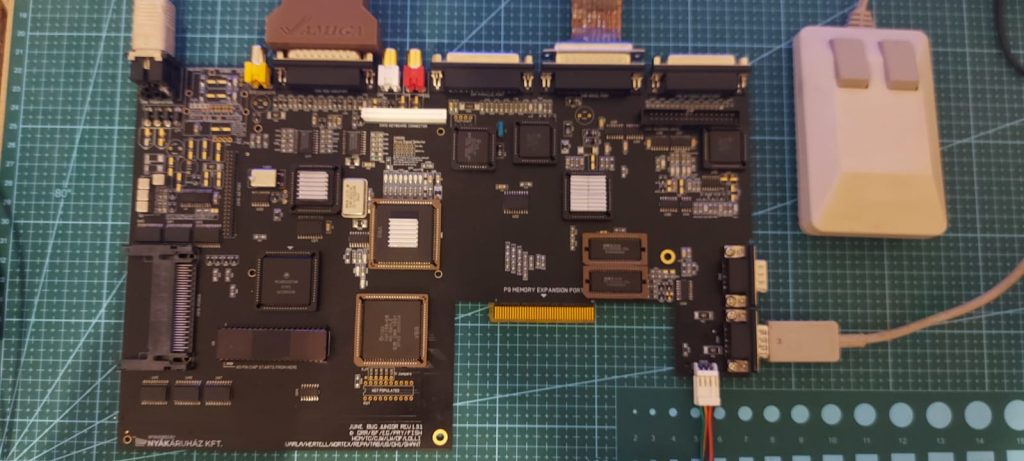
Luego de compartir en los grupos de Commodore muchos me comentaron que por el estado de la placa era mejor armar una de cero y migrar los componentes custom, un conocido “salto de fe” ya que los chips de la Amiga 600 donante podrian estar malos. A esto compre el PCB Junior 600 en idoregesz.hu el PCB Junior 600, luego de esperar casi 2 meses lo tenia en mis manos, todos los componentes y conectores estandar fueron comprados en mouser, gracias a una lista de compras ya hecha.
Pasivos (capacitores, resistencias y ferrite beads), diodos y transistores
Ficha de alimentacion y ferrites de fuente (en vez de poner el toroide que es mas ruidoso)
Sistema de reset con el LM555 y el 74F27 (se puede testear el flanco de reset)
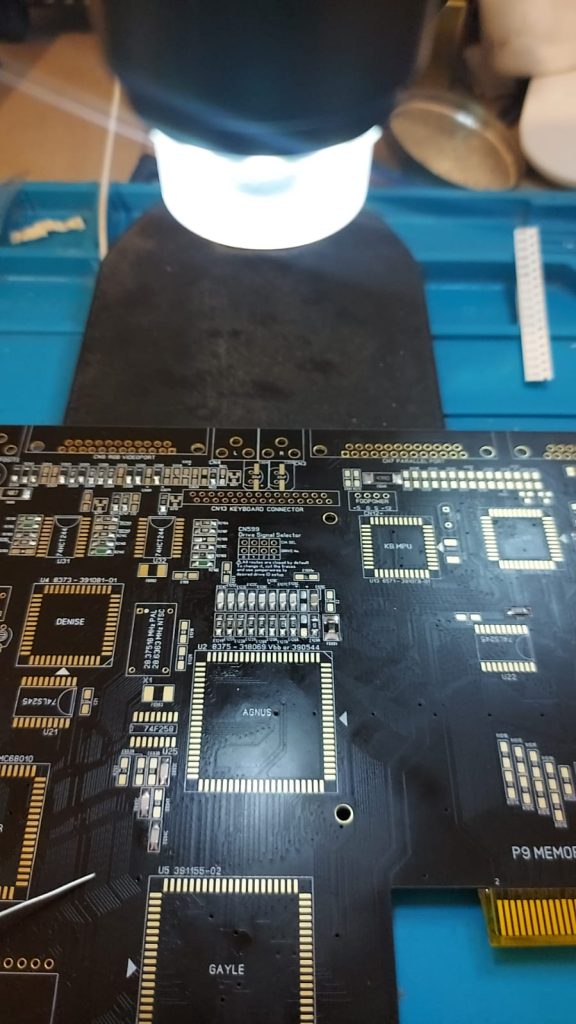
Gayle y Agnus con el clock principal (X1 y 74F258) (se puede ver hsync/vsync a la salida)
CPU ROM el 8520 (CIA) y los U21 y U22 (74LS245)
Paula y U28 (1488) para la salida de serial con el diagrom (requiere el conector de DB25 a DB9) a esta altura podemos conectar a la PC y ver las tramas de diagnostico usando 9600 8N1 en el configuracion de la terminal serie
RAMs y U26 (74F00) y U27 (74F139) (aca ya pasaria el testeo de memoria)
MPU y resonador de 3Mhz para verificar el teclado
Agregamos el DENISE y el chip CXA1145 y deberiamos ver video
Agregamos los CIAs y el U34 y tenemos mouse
Seguimos con los 27LS245 para el PCMCIA y completamos conectores
Finalmente ponemos capacitores electroliticos
Algunas fotos del proceso
Y a terminar de probar!
Pruebas y reniegues
Llegamos al menu pero se ven errores y (de nuevo) la computadora presenta fallas y al tiempo se termina apagando… tan cerca!
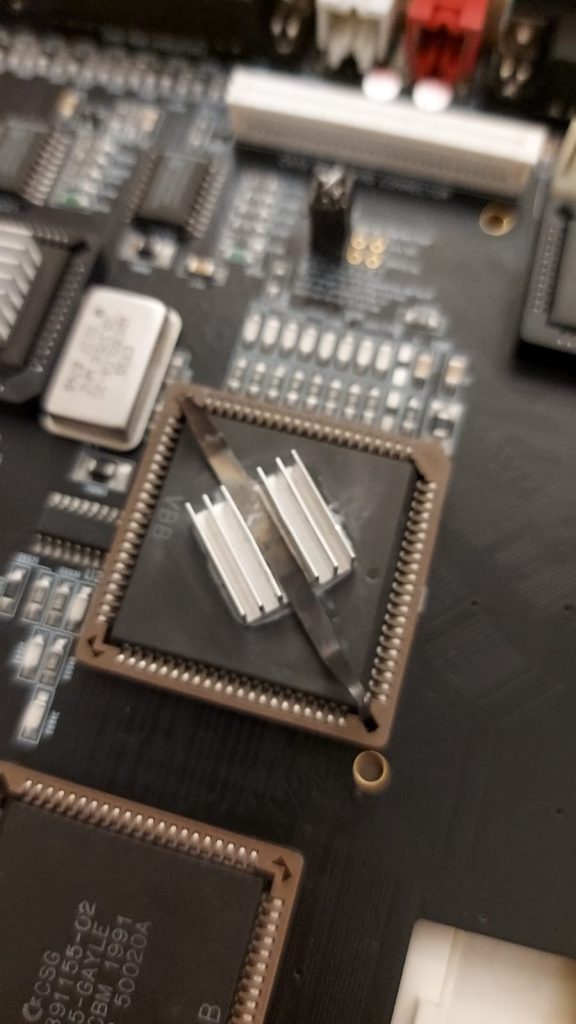
Luego de buscar en los grupos, algunos errores se dan por los socalos PLCC que no generan buenos contactos, asi que se reviso todo, se limpio por sobre todo para los PLCC84 se recomiendan o no usarlos o ponerle los clips sujetores, porque al calentar se saltan del socalo como un pop corn. Eso y unos buenos disipadores.
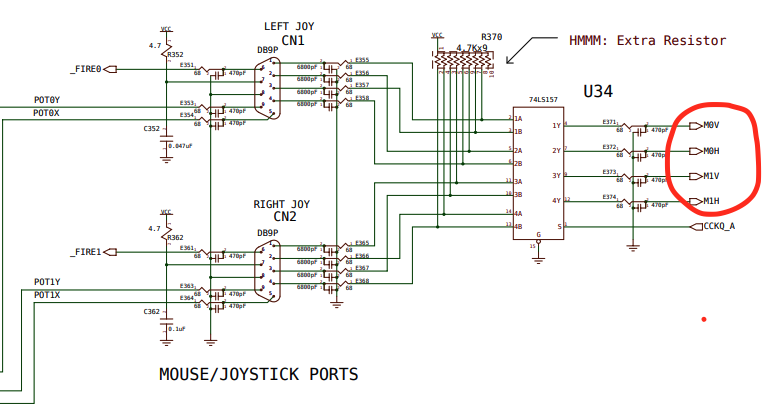
Listo! la maquina empezo a funcionar! pero veia que el joystick hacia lo que queria, el personaje se movia solo.
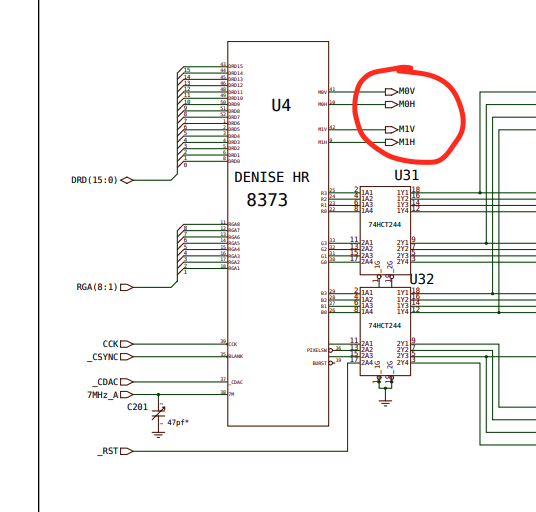
Investigando y la ayuda de Otto, aprendi que con Commodore nada es facil ni bueno, logico. El control parcial del puerto de joystick se manda al DENISE! (que es para video) y lo mas lindo es que no se mandan todos los pines sino que se multiplexan las 4 lineas de cada joystick (arriba/abajo izq y derecha) en solo 2, lo mismo en el otro puerto. Bueno el encargado de eso es un 74LS157 que puede fallar…
Luego de cambiarlos le tocaba el turno al teclado, bueno como era de esperarse la membrana estaba destruida asi que se compro una nueva en Inglaterra. Si compramos para la Amiga600, tambien para otra A1200 que necesitaba…
Sumemos a esto el proceso de retrobright del teclado.
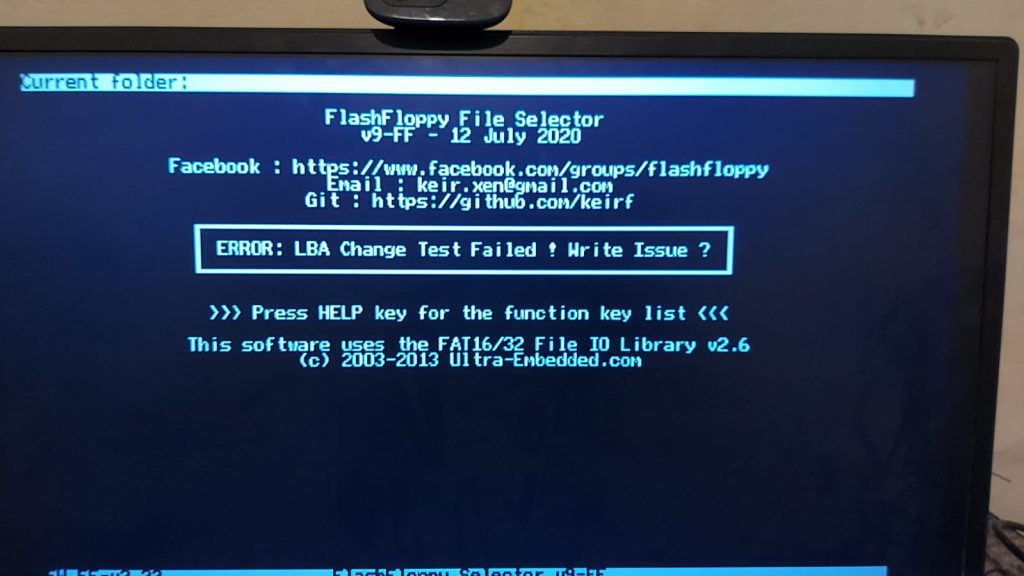
Ya estaba listo para jugar, poniendole algunos juegos nuevos a la gotek que tenia que indexar en el menu y me aparece esto…
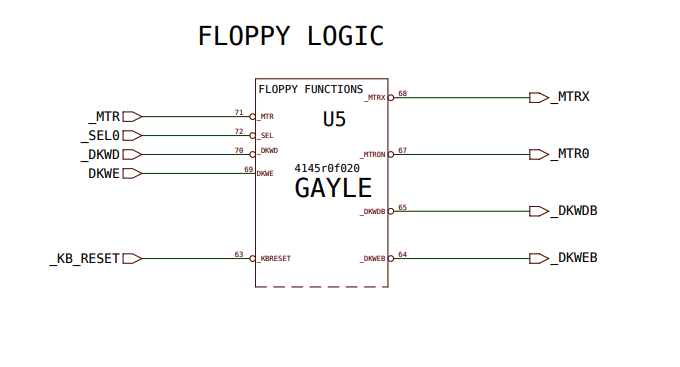
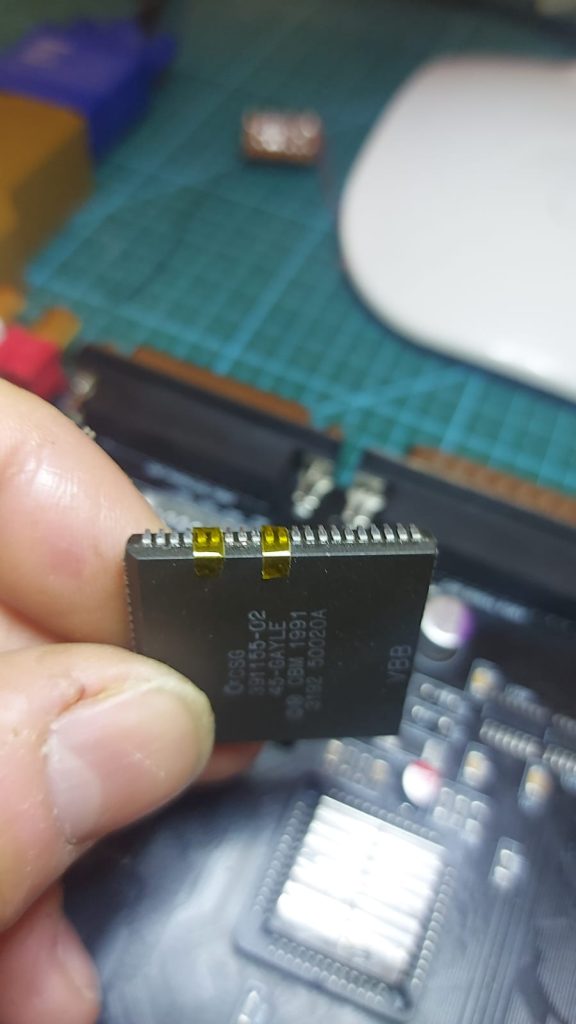
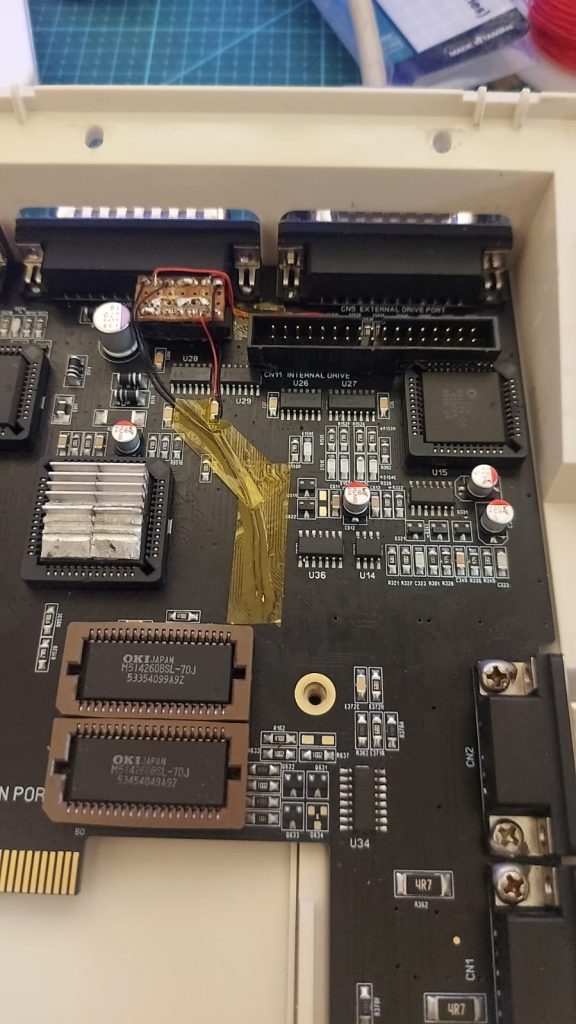
Bueno al parecer la A600 no era capaz de grabar a disco, mirando donde esta esto, encontre una maravilla de las que hacia Commodore (Otra historia interesante que me conto Otto). Para evitar algunas compuertas para invertir Write Enable y poner con bus separatorio a Write Data, lo metieron en el… Gayle!
Era conocido que estas compuertas fallaban con el tiempo y se debio poner lo mismo con logica separada (como en la A1200), si, no me gusta pero lo soluciono. Aislamos los pines en el gayle y los controlamos por fuera.
Exito y Festejo
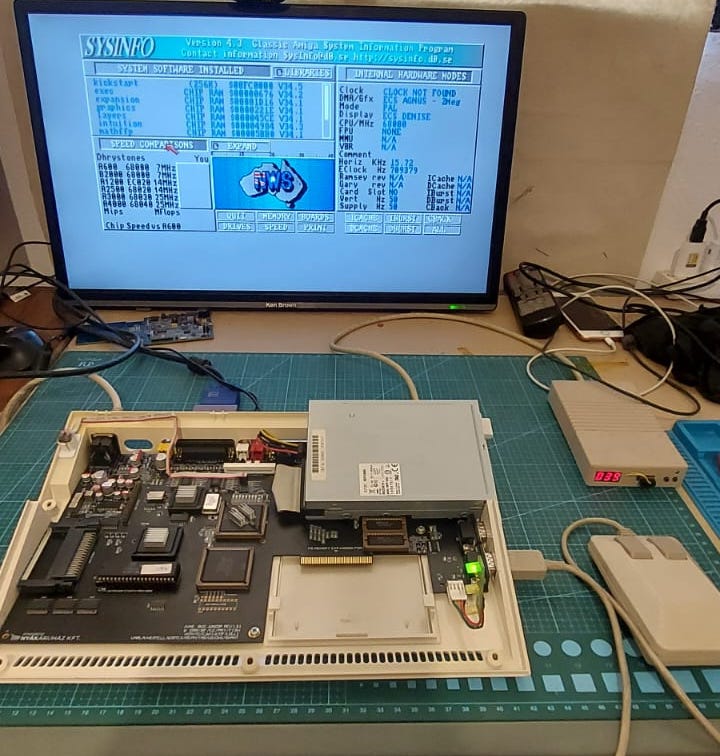
Ya a esta altura la gotek lee y escribe bien y podemos jugar a juegos con autoswap como el Indiana Jones and the fate of Atlantis
Adicionalmente se puso el disco rigido y se pudo validar que funciona perfectamente, al momento no es de mucho uso con 1Mega de ram, asi que esperando la expansion de 1 mega adicional por el trap door y solo Jack Tramiel y Jay Miner saben que le pondre en un futuro a esta hermosa maquina restaurada.
Desconozco la cantidad de horas dedicadas ya que fue un pasatiempo divertido y desafiante y no se lo mira desde el esfuerzo hecho, claramente esto no se hace con fines comerciales sino por la pasion al hobbie y a la tecnologia.
Marcelo Lorenzati Ing Electronico PS en Sistemas Embebidos
Vamos a empezar esta serie analizando que es un módulo de reloj o system clock, por qué se usa, como funciona el de la Commodore 64 a grandes rasgos y por qué vamos a usar otro módulo de reloj durante nuestro estudio.
Les dejo el link al articulo anterior en la serie, y al final como siempre los links a todos los artículos de la misma.
Un módulo de reloj es un circuito electrónico que oscila generando una secuencia de pulsos repetitivos que llamaremos señal de reloj, estos pulsos son distribuidos a todos los elementos lógicos que tenemos en nuestra computadora para que se sincronicen.
¿Por qué se usa?
Porque generalmente nuestras computadoras trabajan con lógica sincrónica. Los gates o compuertas lógicas que usamos para operar sobre los datos tienen un tiempo finito de respuesta a los cambios en los inputs que reciben, esto se llama delay de propagación.
El intervalo entre los pulsos del reloj tiene que ser suficientemente largo como para que los gates y sus salidas se establezcan en valores estables antes de que suceda el próximo pulso de reloj.
Cómo funciona el de la Commodore 64
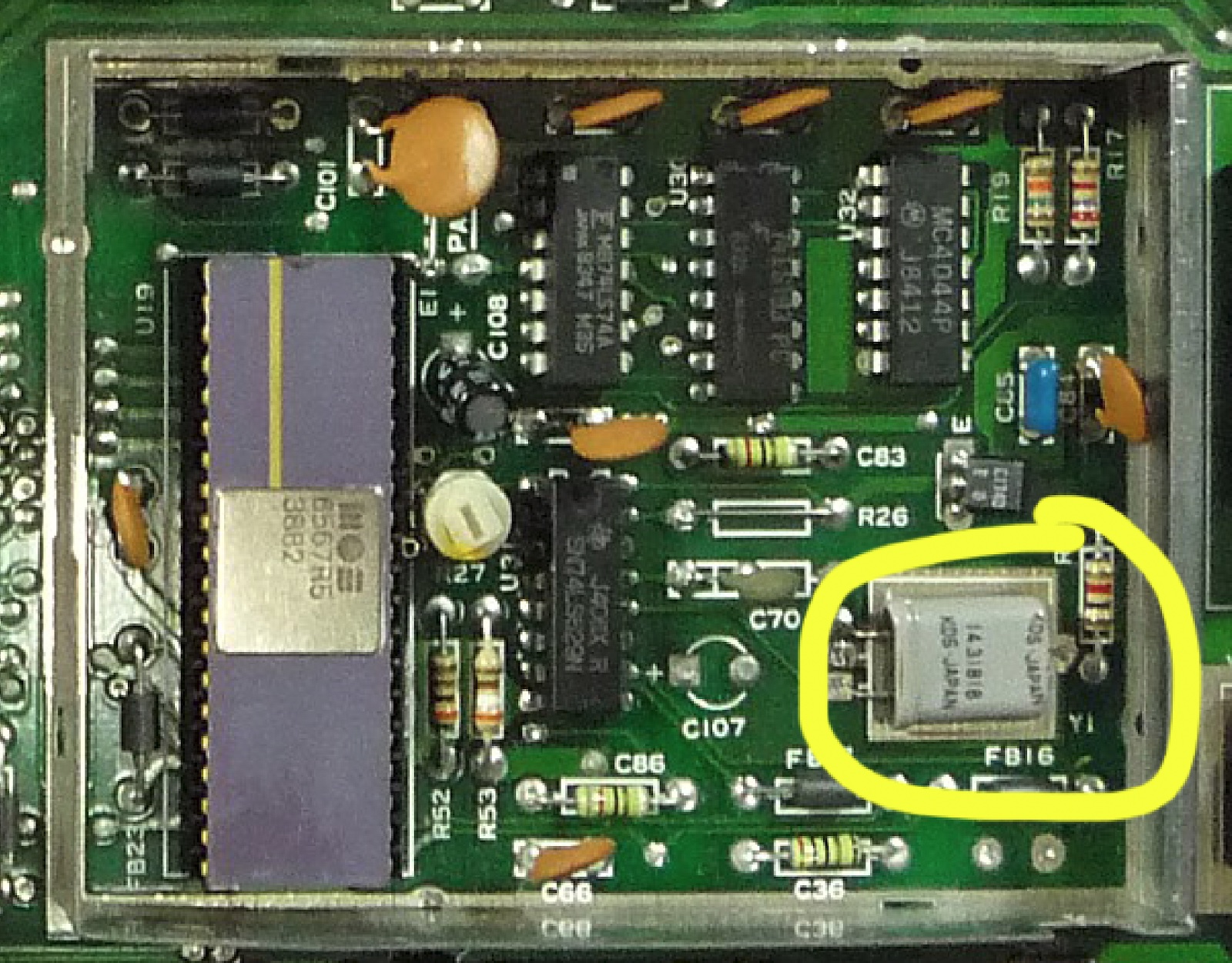
Bienvenidos al infierno, digo a cómo funciona aproximadamente el reloj de la Commodore 64. Y digo aproximadamente por que en este post no vamos a describir el circuito en detalle pero sí algunos vericuetos interesantes.
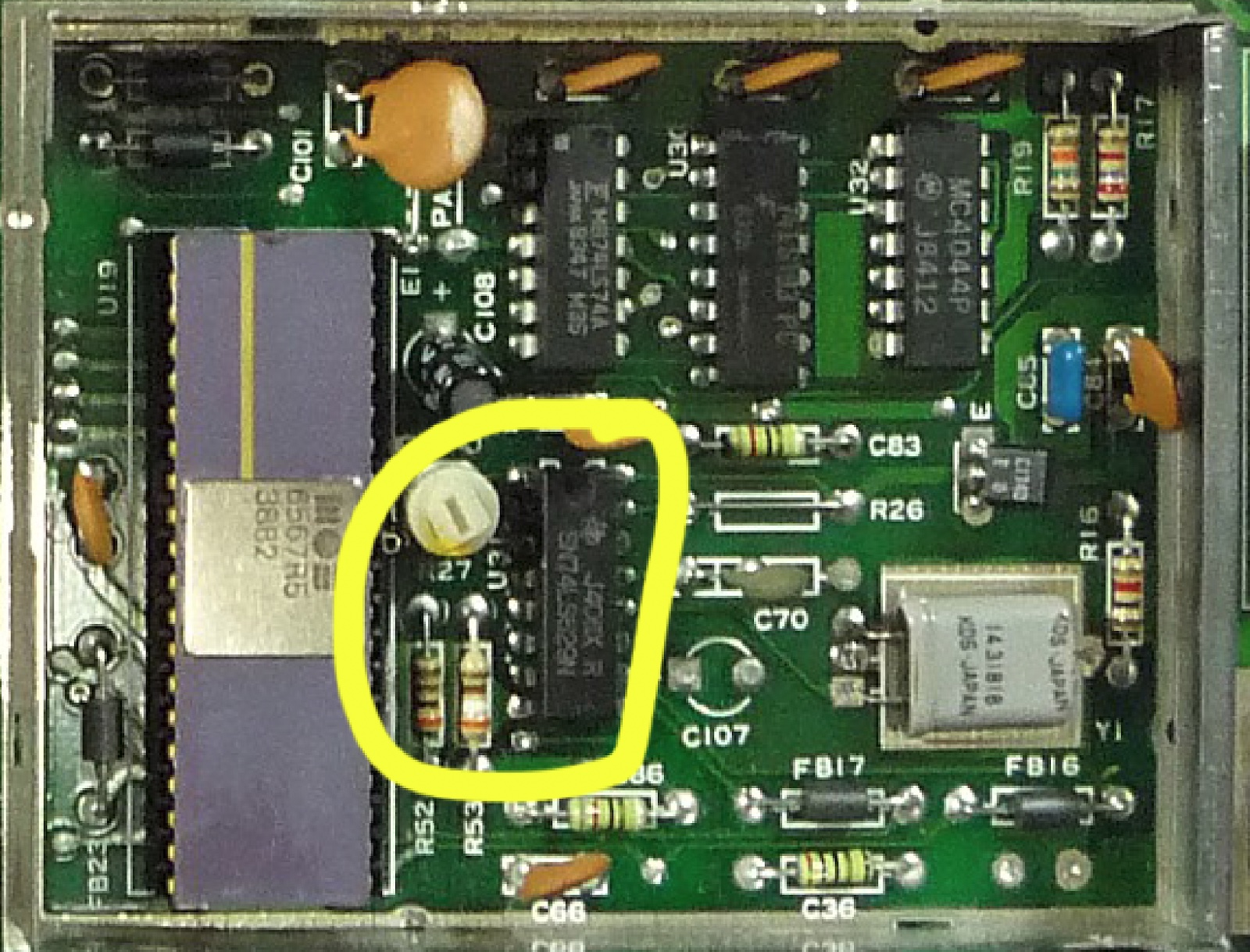
Empecemos con un cristal llamado Y1, este nos da una resonancia mecánica desde la cuál vamos a llegar a través de varios circuitos a los 1 Mhz a los que típicamente corre el 6510.
Ahora dependiendo de si la computadora es NTSC o PAL la frecuencia de la señal va a ser de aproximadamente 14,318 Mhz o 17,73 Mhz redondeando.
A esta señal se conoce como el Color Clock por que al dividir estos números por 4 obtenemos 3.58 Mhz para NTSC y 4.43 Mhz para PAL las cuáles son las señales de carrier responsables de que cómo vemos los colores en nuestros televisores.
Un Circuito integrado conocido como el U31 Dual Voltage Controlled Oscillator nos genera otras frecuencias en 8.18 Mhz para NTSC y 7.88 Mhz para PAL, esta señal se conoce como el Dot Clock y nos dice cuántos píxeles se puede escribir por pantalla en cada refresh de la misma.
Finalmente llegamos al System Clock que define que es un ciclo de CPU como la Commodore 64 es un máquina de 8 bits esto nos limita a mostrar hasta 8 píxeles por ciclo de CPU por lo que corresponde un ciclo de duración de un octavo de Dot Clock.
NTSC: 8.18MHz / 8 = 1.023MHz
PAL: 7.88MHz / 8 = 0.985Mhz
Llegando al máximo de velocidad de 1Mhz del 6510.
¿Por qué usamos otro reloj en nuestro estudio?
Si utilizáramos un reloj de 1 Mhz sería muy difícil ver que ocurre en la cpu por cada instrucción de nuestro programa. Los instrumentos que usamos para medir no podrían detectar fácilmente la variación de bits o impulsos eléctricos en los pines de address bus y no llegaríamos a comprender que sucede en cada paso.
Por eso tenemos un reloj que nos permite parar la pelota e ir más lento, tan lento como queramos, inclusive pulsando un botón vamos a ir ciclo por ciclo de reloj e instrucción por instrucción.
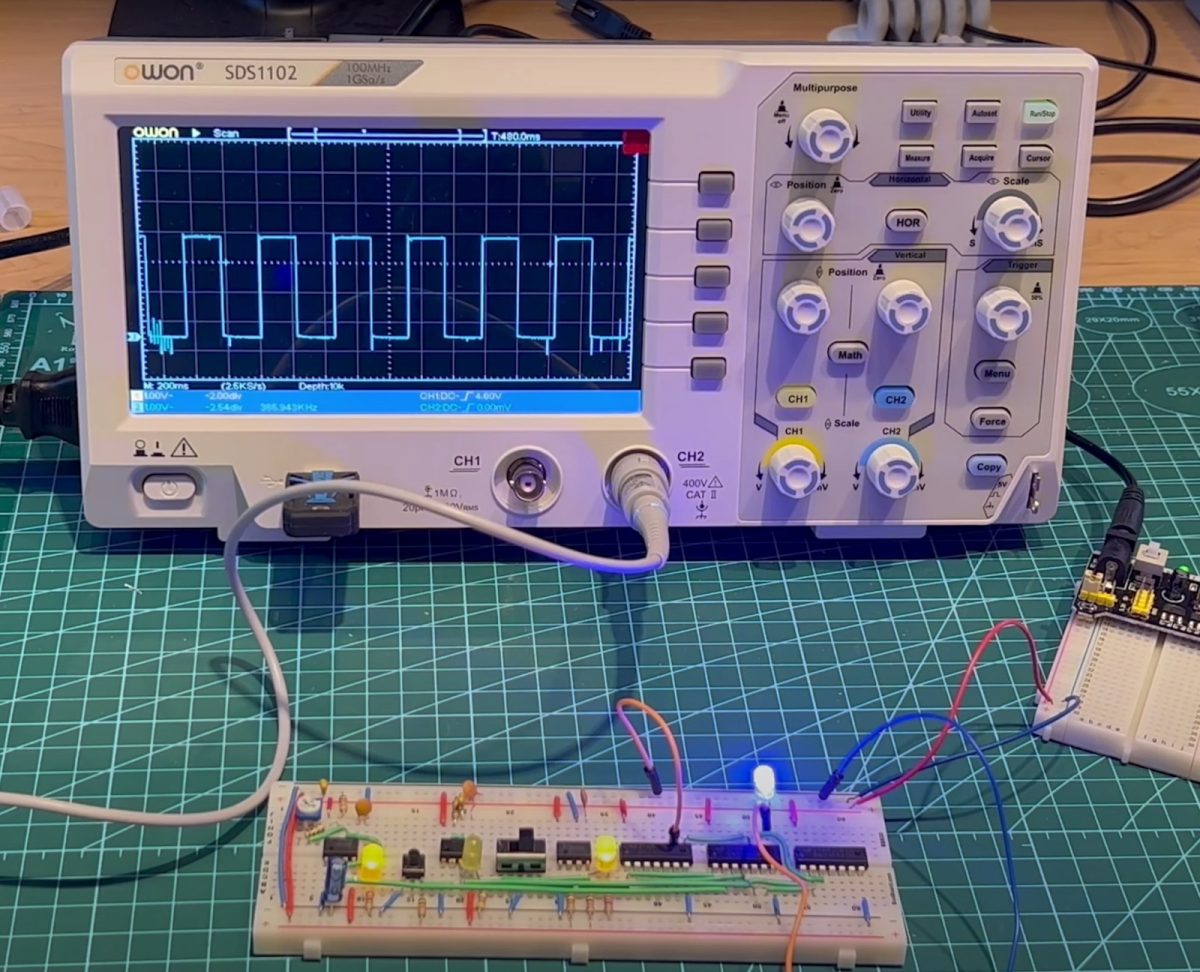
Cómo funciona nuestro clock
Vamos a utilizar el reloj del kit de Ben Eater. Este funciona con tres timer 555 y algunas compuertas and y or, en las referencias les dejo el detalle de como lo arma él en sus videos.
Este reloj nos permite a través de un switch decidir si queremos ir paso a paso cada ciclo de reloj pulsando un botón o usar un potenciómetro para dar la velocidad de las instrucciones.
Cómo Seguimos
Para ver visualmente como funciona el módulo de reloj y cómo corremos el osciloscopio para analizar sus variaciones les dejo el primer video de la serie
Si de chico tenias una micro computadora, seguramente utilizaste pantallas basadas en tubos de rayos catódicos para ver su imagen. Estas maravillas analógicas tuvieron su inicio con la televisión blanco y negro en la década el 30, su apogeo a todo color entre los 70 y 90 y ocaso en el siglo 21 de la mano de la llegada de los LCDs y OLEDs.
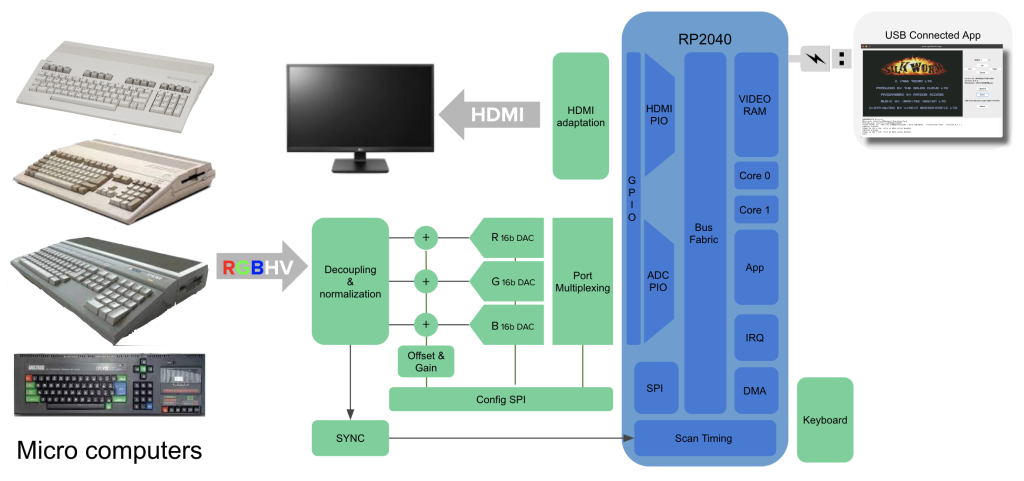
Para quienes añoran usar sus retrocomputadoras hoy día se veran limitados en opciones para contectarla a monitores ya sea porque los de epoca van fallando por paso del tiempo o porque no hay opciones modernas que usen interfaces obsoletas. Aca mostrare una propuesta de codigo abierto simple y economica que pretende ir cubriendo diferentes retrocomputadoras con mas colores y resolución a medida que el proyecto recibe colaboracion y hay dispositivos mas potentes para mejores prestaciones asi como el porque de querer hacerlo.
Uniendo la retrocomputacion con la electronica digital
Cada persona tuvo su camino particular con las microcomputadoras, en mi caso la Commodore 64 abrio un mundo de posibilidades no solo en la programacion sino en la electronica digital, dado que fue de las primeras computadoras en ofrecer una arquitectura abierta y extensible a traves de sus diversos puertos y su amplia documentacion. Esto me llevo a recorrer el camino de la electronica digital como tecnico, ingeniero y finalmente especialista en electronica y sistemas embebidos. En este camino dejo entreveer que mas alla de que los sistemas actuales tienen bases en los sistemas de computo antiguos, muchas cosas siguen manteniendose relevantes en sistemas embebidos (o dedicados de un solo proposito). Todavia se usan microcontroladores de 8 y 16 bits, todavia se usan perifericos clasicos como en los 80 y todavia es valioso programar sabiendo que hardware tenes bajo el capot.
La retro computacion como filosofia mas que hobbie
Por definicion la retrocomputacion es una serie de actividades que involucran computadoras antiguas.
Preservar: Arreglando hardware de los equipos con componentes defectuosos
Extender: Ampliando las capacidades originales del sistema a traves de sus perifericos o puertos
Desarrollar: Generando nuevas aplicaciones y juegos
Difundir: Dando a conocer a traves de convenciones, redes sociales y foros sus hitos e historias
Enseñar: Como estos sistemas fueron base de sistemas actuales, todavia presentes en la arquitectura de computadores.
Para los seguidores de la retrocomputacion ademas de todo esto, al ser sido parte de esa historia, hay nostalgia y buenos recuerdos asociados. Que mejor manera que rendir tributo a estos recuerdos que colaborando de alguna manera y dado que en estos años mi colaboracion fue mas desde la recuperacion de equipos y desarrollo de algunas interfaces que la comunidad open source comparte y queria ir un poco mas alla con algun desafio.
El primero que aparecio fue claro: “no estan quedando monitores que soporten RGB o las opciones que hay son muy costosas”, mirando el mercado actual las opciones no son prometedoras:
Open Source Scan Converter: Este dispositivo provee las mejores prestaciones para captura y representacion de la imagen, con el inconveniente de su alto costo por estar desarrollado con FPGA ( Matriz de puertas programables)
Conversores SCART genericos: Estos dispositivos son relativamente economicos pero no hay mucha disponibilidad y el problema fundamental es que introducen altisima latencia y destruyen la imagen original al procesar los cuadros para presentarlos en pantalla
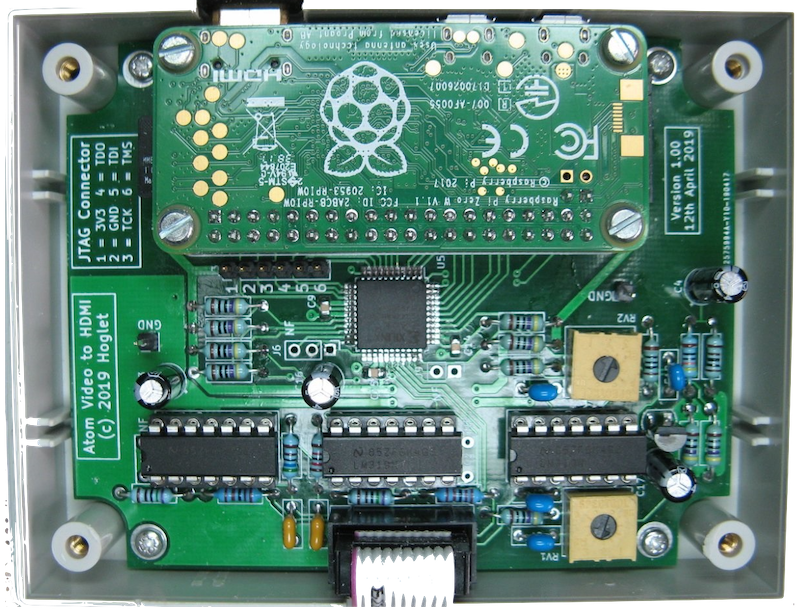
pi Zero RGB2HDMI HAT: Este dispositivo tiene una gran calidad de imagen con una moderada densidad de color, debido a que cuenta con una computadora raspberry pi zero y una serie de placas que se colocan en su puerto de entrada salida. Termina siendo caro asi como complejo
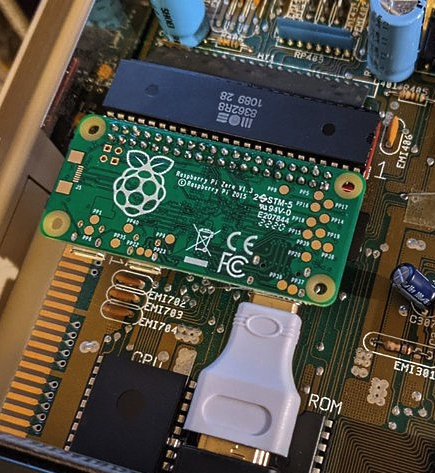
AMIGA digital Video: Este dispositivo es especifico de Amiga, se instala dentro de la maquina y lee las señales digitales de la salida antes del converso de digital a analogico. Su calidad es excelente pero es sumamente invasivo y especifico a un equipo, asi como costoso porque utiliza una computadora y su salida HDMI solo para lograr la representacion de la imagen.
Basandome en mis conocimientos de procesamiento digital y de embebidos sabia que habia tiempos de captura de señales a muy alta velocidad asi como requerimientos de tiempo critico para que la señal no sufriera los conocidos “desgarros”, lo cual lo hacia un desafio digno. Sumado a esto, pense en utilizar no tanta potencia y costo en una FPGA sino un microcontrolador de propositos generales, obviamente al compartir mis intenciones recibi muchas negativas de que no iba a ser posible, pero no hay nadie mas obstinado que un ingeniero que le digan que no se puede…
Intro al RGB
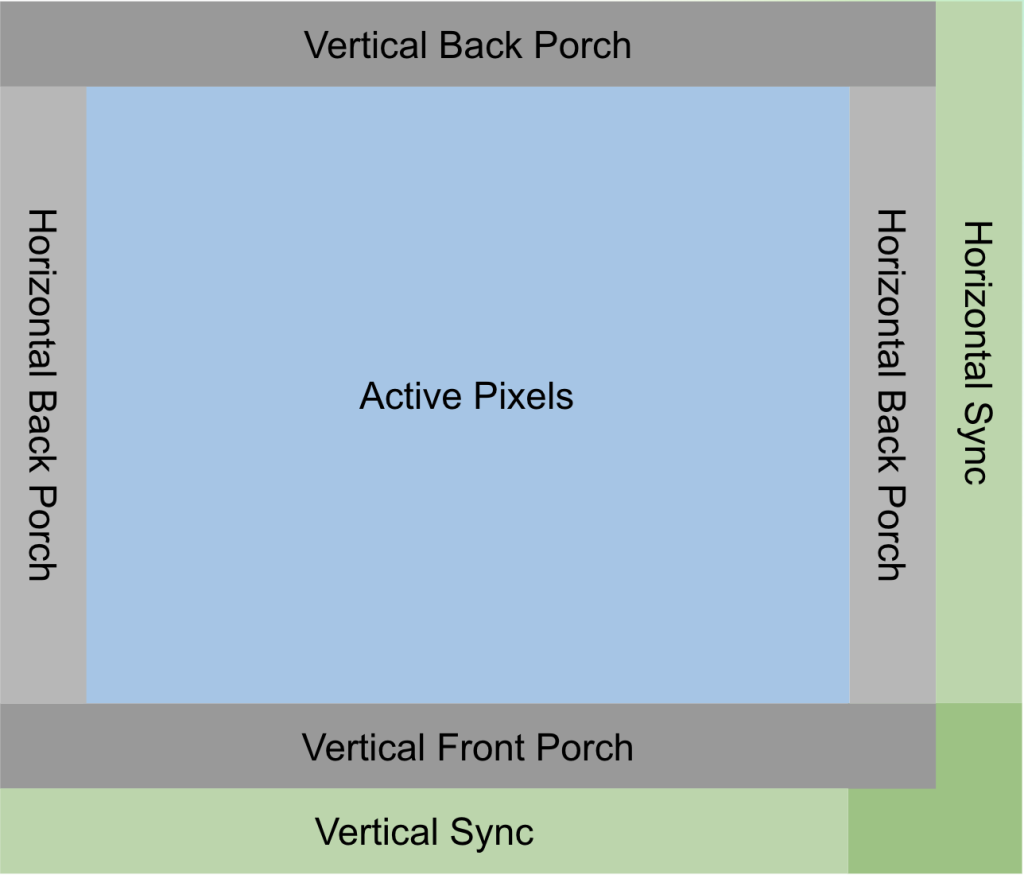
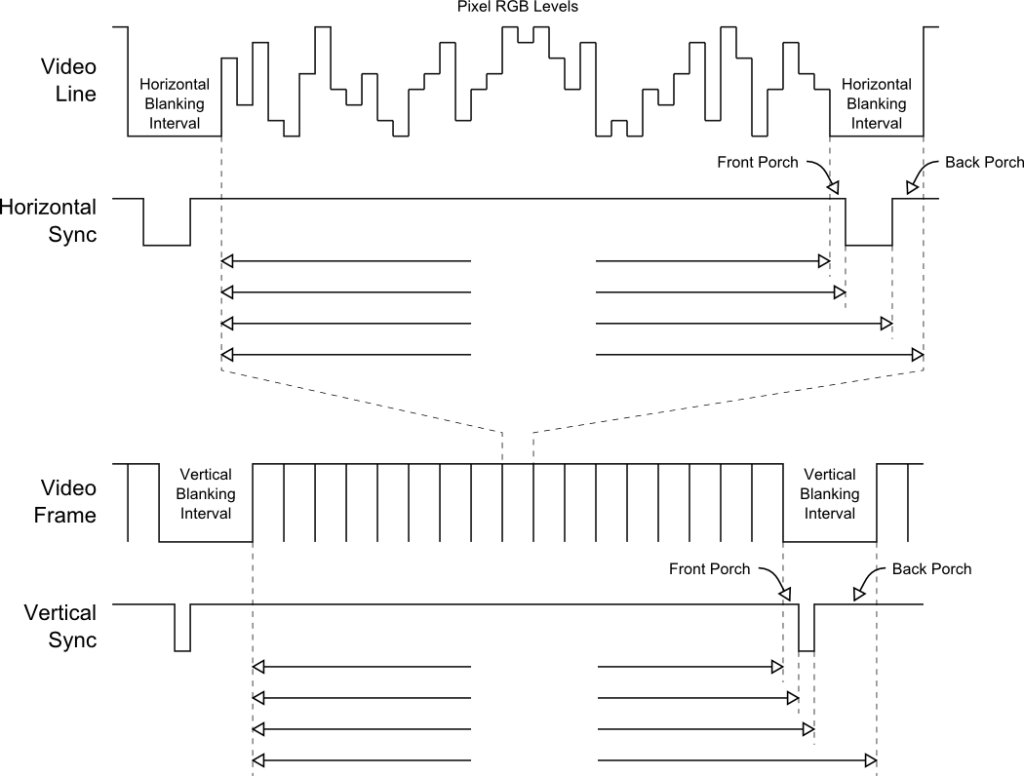
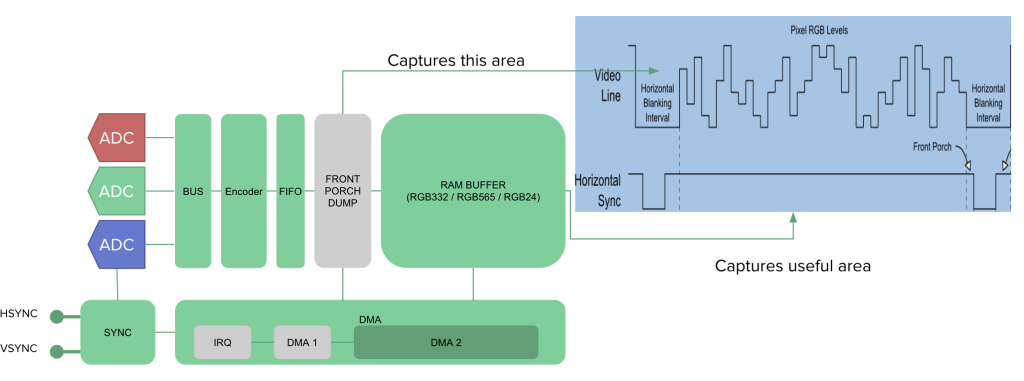
Para resolver el desafio primero hay que entender como funcionaban los monitores analogicos, en especial los RGB, el cual fue el estadio intermedio entre los monitores de TV clasicos (PAL / NTSC / SECAM) y el VGA. Estos utilizaban 3 lineas analogicas para el rojoverde y azul (de ahi su acronimo) y contaban con una linea de sincronismo compuesto o dos lineas para vertical y horizontal en formato digital. La informacion era enviada como variaciones de intencidad de luz a traves del tiempo, con un barrido de izquierda a derecha y de arriba a abajo, la cual se podria recuperar y encuadrar al usar las señales de sincronismo.
Las imagenes muestran la relacion entre el barrido y las areas de informacion de video y señales de enganche y las señales de video y sincronimo. Cada inicio de linea era marcado por un flanco de bajada y subida abrupto de la linea de horizontal y cada cuadro completo por el el flanco de bajada y subida abrupto de la linea de vertical. La cantidad de disparos verticales en un segundo da los cuadros por segundos representados. Los espacios entre el flanco de disparo y el inicio de video marca el porche trasero y el espacio sin señal de video hasta el nuevo dispare el porche frontal, en similar medida para con el vertical, ambas marcan espacios sin informacion de video, para permitir “retornos” de linea de video, dado que en los tubos de rayos catodicos habia un tiempo inherente de retorno de linea.
Por ende, para resumir, si quisieramos capturar el video necesitamos engancharnos a la señal de sincronismo horizontal y comenzar a adquirir pixel a pixel, pero deberiamos conocer que ancho tiene cada pixel.
Aproximaciones teoricas
De este punto en adelante se plantearan teoricamente partes necesarias de la solucion.
Flujo de temporizado de captura
Hay ciertos calculos que son faciles de sacar, como cual es la resolucion vertical, que es la cantidad lineas horizontales o disparos de horizontal que se dan antes de que se produzca un disparo vertical (en modo progresivo). Otros que son parametros de entrada, como los pixeles por linea, que solo dependen de la capacidad del receptor para capturar cada pixel. En un monitor analogico lo da el ancho de banda de video y la definicion del pixel en el TRC. En el caso del capturador, por la cantidad de memoria que dispongamos por linea y la capacidad de captura del conversor analogico a digital. Esto se conoce como frecuencia del pixel que es resolucion total horizontal x vertical x cuadros/seg. En 640×480 y 60 cuadros son aprox 800x525x60=25.175Mhz Otro punto no menor es que el CAD debe ser capaz de adquirir los 3 colores al mismo tiempo, sino estariamos capturando el rojo de un pixel y potencialmente el azul del siguiente. Este modulo tambien tiene la responsabilidad critica de responder rapido y sin variaciones al disparo de horizontal, si esto no se cumple sera visible en la pantalla las variaciones.
Transporte y conversion
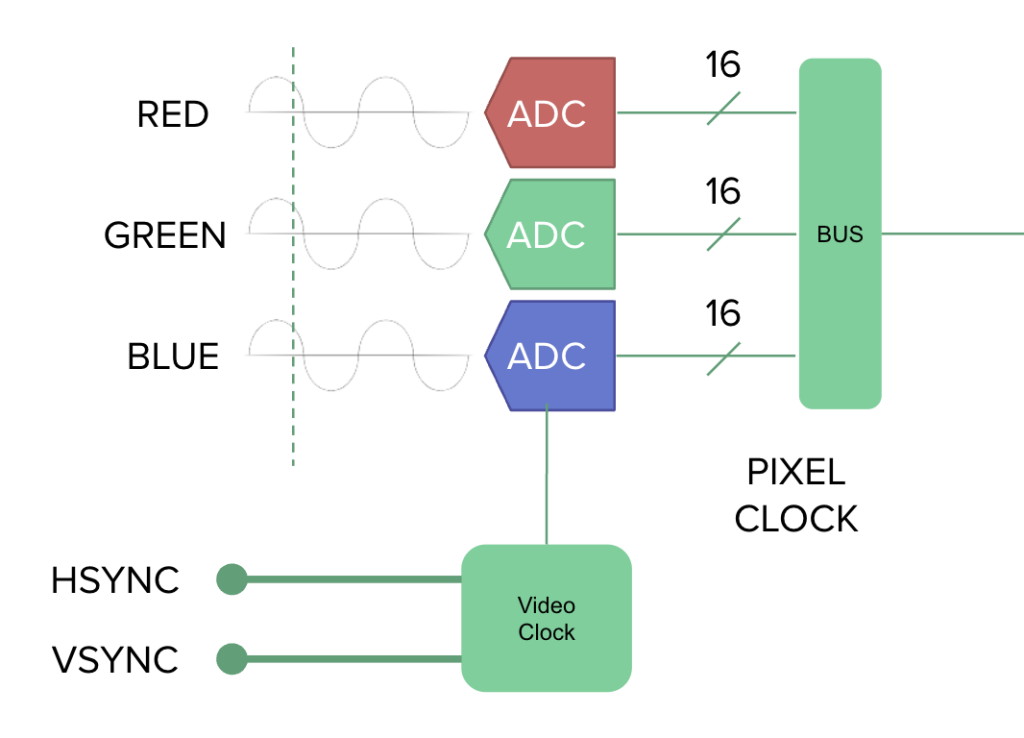
Esta etapa tiene varias responsabilidades, una es la de tomar lo que sale del adquisidor y transportarlo al microcontrolador por el puerto que este tenga, otra es la de convertirlo en tiempo real al formato de colores que se haya dispuesto de memoria para presentar en pantalla pero la mas importante es la de unir estos puntos con un mecanismo automatico de desligue al procesador de la tarea, en este caso el uso de DMA (Acceso Directo a Memoria). En nuestro caso se usara un ADC de 16 bits por color y un bus de 8 bits asi que los 24 bits finales de color, como las pantallas HDMI manejan 24 bits, es logico descartar el byte mas bajo de cada color.
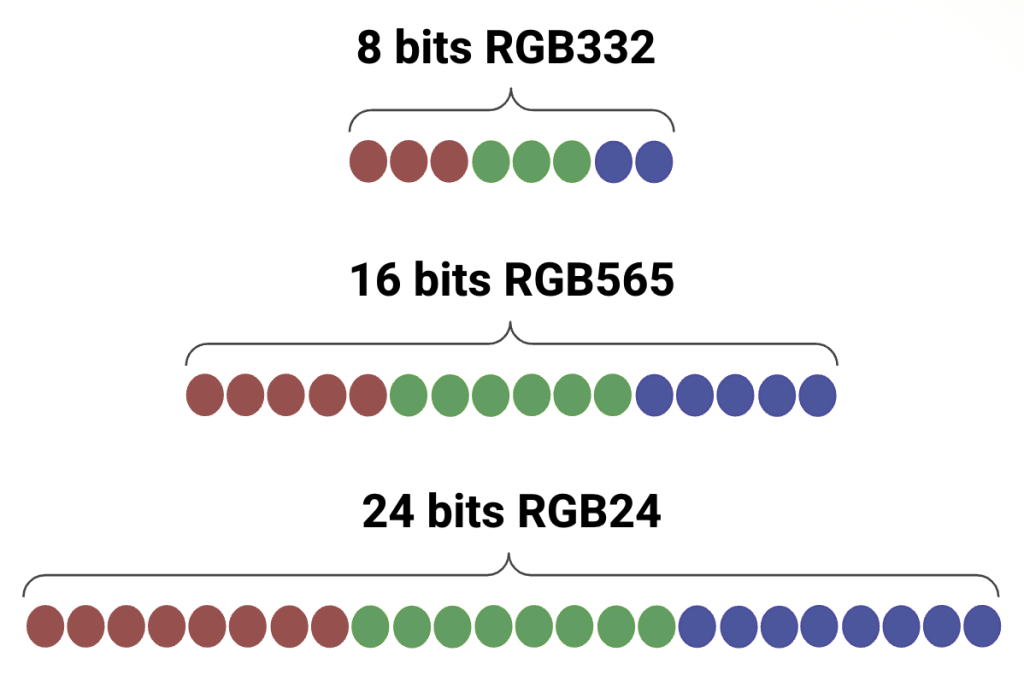
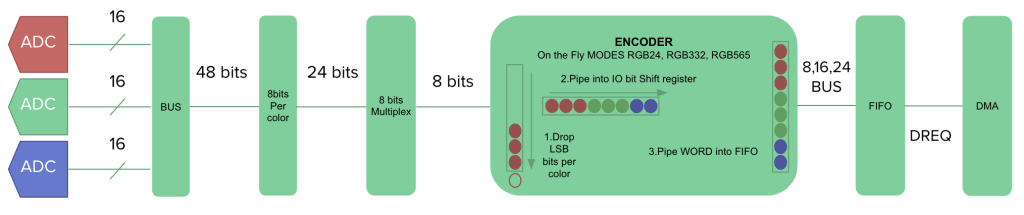
En el grafico de la izquierda se ven algunas compresion de color mas usadas con la cantidad de bits por color. Para comprimir en tiempo real hay que tomar la entrada, color por color y descartar la cantidad correcta de bits de cada uno hasta completar los 3 colores. Esto se puede ver en el siguiente grafico, donde se usa un registro de desplazamiento para ir procesando cada color, tirando los bits menos significativos y pasando lo al buffer.
Almacenamiento
Esta etapa repite la vision de los puntos anteriores pero hace un paso atras para tener una vision mas amplia, que es que parte de la informacion que capturo va a la memoria que se dispone. El video tiene ni bien se dispara un back porch sin informacion util, pero seguido de informacion util, el desafio es esperar siempre la misma cantidad de tiempo. Para eso se utiliza el mismo mecanismo de captura, pero en vez de poner de destino un area de memoria de video, se envia a una unica posicion dummy. Esto se logra usando encadenamiento de DMA, para que sea de manera automatica. Una vez hecho esto la memoria se llenara de una linea a la vez, usando como infomacion de linea un conteo de cuantos disparon HSYNC se tienen, hasta el proximo disparo VSYNC que resetea la cuenta.
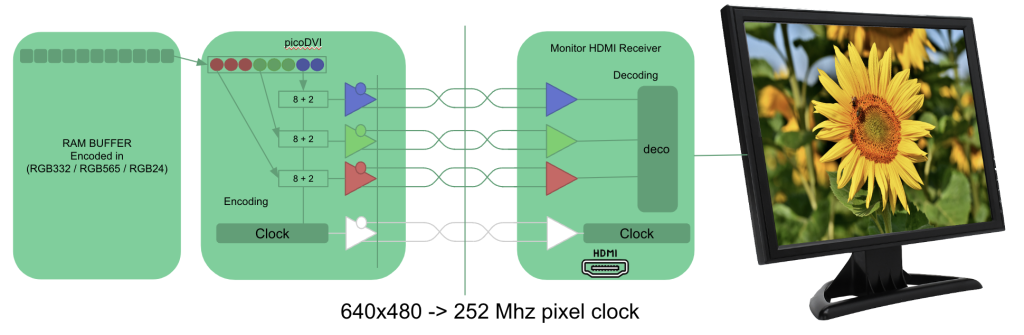
Renderizado HDMI
Una vez que se haya logrado guardar un cuadro completo de la imagen capturada, se puede utilizar para la entrada de una placa de video, pero que tal si lo hacemos SIN una placa de video? Esto es posible gracias a un proyecto opensource llamado picoDVI, que permite utilizar un microcontrolador de propositos generales Raspberry pico RP2040 (no confundir con la raspberry pi), el cual utiliza 8 pines del microcontrolador para generar al vuelo las señales de DVI, precursor del HDMI. En la pagina de Wren6991 esta bien explicado, pero en resumen, se encodean los pixeles para generar tramas TMDS, usando 8 bits por color y 2 bits de correcccion. Esta informacion se manda para el rojo, verde, azul y reloj de manera diferencial para suprimir el ruido, de ahi las 8 lineas usadas. DVI limita la cantidad de monitores, aunque la gran mayoria lo soporan, igualmente en mi fork de picoDVI realize el soporte de HDMI, con la inclusion de audio, el unico detalle es que DVI se puede usar sin pagar y HDMI requiere pagar licenciamiento y verificacion de complimiento de estandar. Si lo usas a nivel personal, nadie te va perseguir por usarlo en tu casa, si vendes miles de unidades seguro te tocan el timbre.
Cuando no hay perifericos, martillazos
Los microcontroladores de propositos generales (SoC) pueden tener conversores analogicos a digitales, puertos series como el USART, I2C o SPI, pines que responden a interrupciones o algunos mas especificos, pero la pregunta es como mostrar video sin un periferico de video? Para esto primero cuento como se hace normalmente cuando se quiere “programar” un periferico, bueno se usa bit banging, que es esto? Bit Banging es tanto leer como escribir los pines de I/O del micro para generar a fuerza de codigo un comportamiento, cual es el truco? Bueno que se requiere muchos mas ciclos de reloj de lo que necesitaria el periferico, esto es porque el programa debe leer estados para poder decidir y esto requiere al menos 2 muestras para no errarle. Este numero suele se mucho mayor, alrededor de 10 veces, porque las instrucciones de un micro no son de un ciclo de reloj.
Esto hace que el micro se vea ocupado haciendo tareas que son realmente triviales para un periferico dedicado, lo cual es un mal uso del micro.
Procesando los numeros
Si vemos los casos de arriba, tanto para la captura como para la renderizacion requeririamos un micro de 1200Mhz para captura y de 2500 Mhz para renderizacion HDMI, los numeros no cierran. Y todavia resta espacio de micro para que se puedan hacer otras cosas, asi que hay que buscar otra manera.
Salvando el dia con el PIO (del rpi Pico)
El RPI Pico 2040 es el primero de una familia de microcontroladores de la Raspberry Pi Foundation, entre sus caracteristicas:
Procesador Cortex M0 de doble nucleo
2 Mbytes de Flash de programa
264Kbytes de RAM
USB 1.1
26 pines de IO
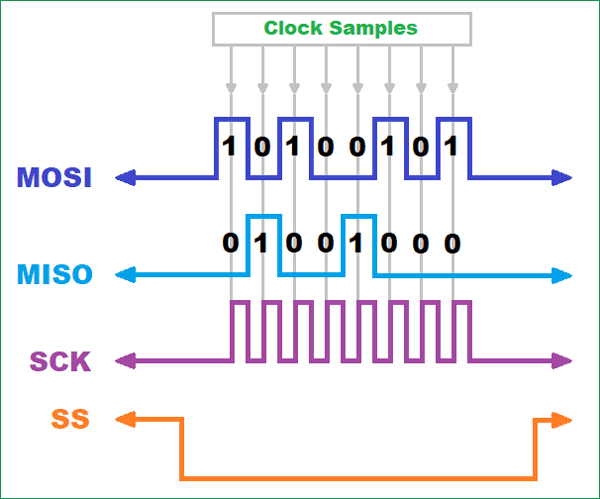
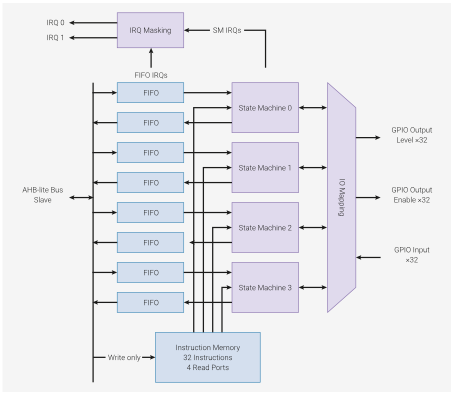
Timers, SPI, USARTs, CAD y…. 2 PIO (programable IO) de 4 maquinas de estado cada uno, pero que es esto?
La PIO no es mas que un periperico programable de entrada salida que permite desarrollar perifericos no existentes en el micro. Esta directamente conectado a los puertos de entrada salida, puede conectarse al DMA y lo mas interesante es que tiene su propio set reducido de instrucciones que corren separado del procesador principal.
El pocas palabras es como tener 8 pequeños microcontroladores que pueden correr codigo a ciclo perfecto (cada instruccion es un ciclo de reloj). Con esto se pueden dedicar un pequeño procesador (llamado maquina de estado) a capturar la entrada, comprimirla y mandarla a memoria y otros a transportar las tramas TMDS a la pantalla HDMI, sin uso de la CPU.
Armado
Con lo expuesto antes, se arman todos los modulos y etapas aprovechando los PIOs del RP2040, los DMAs para transferencias sin uso de CPU e interrupciones por flanco de HSYNC y VSYNC y se dispone memoria (que no es mucha) para modos de 320×240 y 16 bits o 640×240 y 8 bits, asi como el uso de pines para teclado y el USB para gestion remota.
La frecuencia de trabajo del micro esta en 250Mhz, para lograr la velocidad necesaria en el HDMI, esto significa que el limite de los 133Mhz se ha superado, pero porque anda? El limite de los 133Mhz lo dicta la memoria flash QSPI, que encima tiene mas penalidades en tiempo porque el codigo que se cachea no necesariamente es el que se va a ejecutar (logica de prediccion de salto). Pero, si corremos desde RAM, no tenemos esa limitacion, y para eso toda rutina critica, se marca para correr a maxima velocidad. El micro principal no se ve afectado.
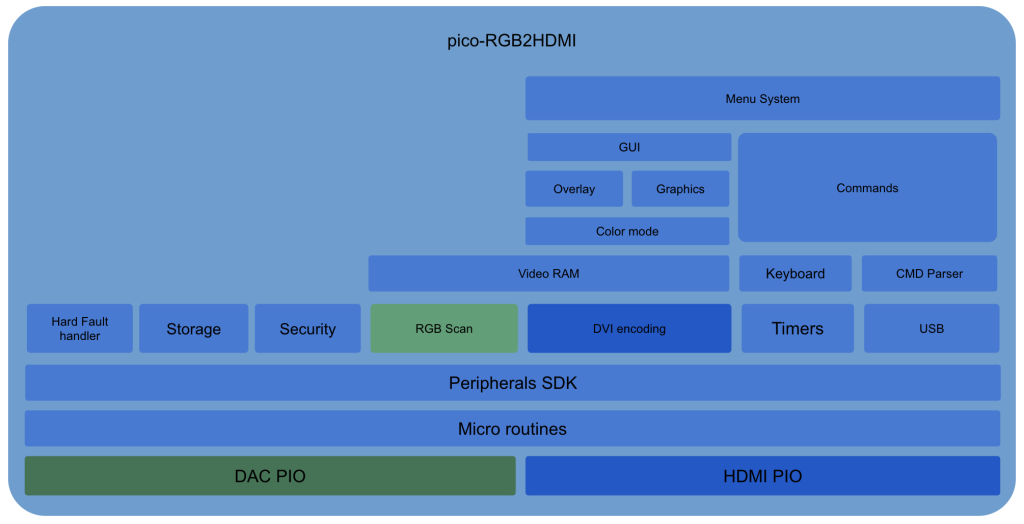
Pila de Software
El software esta desarrollado de manera modular, desde las rutinas de bajo nivel para captura y renderizacion como las de menues en pantalla y sobre imposicion en pantalla. Salvo el SDK de Rpi Foundation (que fue modificado) y la libreria de DVI (que tambien fue modificada) todas las otras librerias fueron realizadas de cero.
Videos del conversor
Aca comparto una serie de videos de youtube, no tienen una gran edicion, son caseros pero muestran la idea.
Primer video del pico RGB2HDMI
Aplicacion USB para captura de imagenes
Sistema de menues
Charla en Commodore eu
Menues integrados
Firmware unificado para ambas resoluciones y guardado de configuraciones
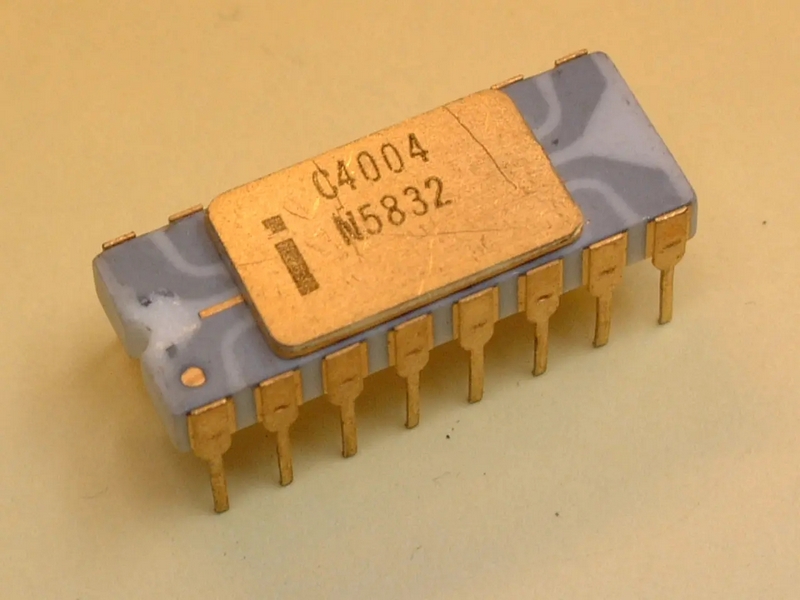
Conoce la historia del intel 4004, el primer microprocesador de la historia.
Intel 4004
Unos meses antes de que Federico Faggin comenzara a trabajar en Intel, la compañía de calculadoras japonesa Busicom le había encargado a la empresa el desarrollo de unos cuantos chips. El ingeniero Ted Hoff, uno de los primeros empleados de Intel, creyó que los circuitos integrados propuestos por Busicom eran demasiado complejos, ya que requerían miles de transistores, e ideó un chip de 4 bits que ejecutara las funciones de la calculadora. El por entonces CEO de Intel, Robert Noyce, le dio permiso para continuar trabajando en el proyecto. Junto a otro ingeniero, Stanley Mazor, crearon la arquitectura básica, el diagrama de bloques, el setde instrucciones del microprocesador.
Otros ingenieros también trataban de desentrañar por entonces cómo crear un microprocesador. El mismo Federico Faggin opina que “no fue un paso tan extraordinario, era simplemente tomar lo que el cliente quería hacer y hacerlo mejor en ese momento, sencillamente porque la tecnología de puerta de silicio de Intel permitía colocar el doble de transistores en el mismo chip y usando una RAM dinámica podías reducir aún más el número de transistores”. Pero hasta que él llegó a Intel, el proyecto para Busicom estuvo parado durante meses. Faggin estaba feliz porque pensaba que era el momento correcto para construir una CPU en un chip, pero al mismo tiempo estaba preocupado porque Intel había prometido un tiempo de entrega muy corto.
Intel lo había contratado demasiado tarde para cumplir lo pactado, y tampoco había valorado la dificultad del proyecto. De hecho, al día siguiente a su incorporación, él, Hoff y Mazor recibieron la visita de Masatoshi Shima, un ingeniero de Busicom, que se encontró con la noticia del escaso tiempo con el que disponían. Faggin se puso manos a la obra, y durante meses trabajó a conciencia, quedándose en Intel hasta altas horas de la noche para lograr su meta. No solo tenía que dar vida a ese chip, sino que el pack incluía el desarrollo del 4001 (una memoria ROM), el 4002 (una RAM) y el 4003 (un dispositivo de entrada/salida). Shima, el ingeniero de Busicom, durante seis meses estuvo en Intel ayudándole y comprobando sus avances.
Para 1971, Faggin había desarrollado toda la familia de chips e Intel los presentaba anunciando una nueva era de la electrónica integrada. Aunque es difícil determinar la contribución que hizo cada uno, lo cierto es que no solo Federico Faggin, sino también Ted Hoff y Stan Manzor, han pasado a la historia, conjuntamente, como los padres del microprocesador.
El Intel 4004 fue lanzado en un paquete de 16 pines CERDIP el 15 de noviembre de 1971. El 4004 fue el primer procesador de computadora diseñado y fabricado por Intel, que previamente se dedicaba a hacer semiconductores de chips de memoria. En su anterior empleo, en Fairchild, Faggin había desarrollado una tecnología pionera llamada Silicon Gate Technology (SGT) y también había diseñado el primer circuito integrado MOS usando la tecnología SGT (el Fairchild 3708), demostrando la viabilidad de la nueva tecnología. Tan pronto como empezó a trabajar para Intel, Faggin creó una nueva metodología de «Random Logic Design» con silicon gate, que no existía previamente, y la utilizó para encajar el microprocesador en un único chip. Su metodología fue usada en todos los primeros diseños de microprocesadores de Intel (8008, 4040, 8080).
Masatoshi Shima, que asistió a Faggin durante el desarrollo de la familia 4004, más tarde escribió el software para la calculadora Busicom y se unió a la compañía Zilog, fundada por Federico Faggin a finales de 1974 y la primera compañía dedicada exclusivamente a microprocesadores, para el desarrollo y diseño del microprocesador Z80, uno de los tres chips que provocaron la revolución de las home computers en los años 80’s.