

Cuando aprendí a bordar en punto cruz en el 2015, mi primer proyecto fue bordar a LeChuck del Monkey Island 2. Me parecía increíble que las crucecitas del punto cruz fueran como pixeles, lo que me permitía hacer aparecer en la materialidad y tocar todos los pixelitos suaves de algodón que quisiera.
Lo hice para practicar “mini punto cruz”, que es como el punto cruz pero en una tela de trama mucho más apretada donde los pixelitos quedan en versión “mini”. Subí la foto a las redes y en seguida un montón de personas me escribieron para decirme cuánto les gustaba lo que había hecho, algunos estaban incluso interesados en comprármelo.
En ese momento descubrí que al contrario de lo que pensaba, no solo a mi hermana y a mí este juego nos había marcado la vida. En 1995 cuando jugué The Secret of Monkey Island, en mi clase nadie jugaba videojuegos, no eran populares. Compartía la alegría con mi hermana y con mi viejo, que volvía de trabajar y se sentaba con nosotras en la computadora a jugar.

Cuando nos trabábamos en una parte, era imposible avanzar. Sin internet, sin compañeros de clase que lo jugaran, nos quedaba la prueba y error eterna hasta entender qué había que hacer.
Me acuerdo que en el Monkey Island 2 estuvimos una semana encerradas en la prisión, hasta que entendimos que podíamos “abrir” el “colchón” y que debajo se encontraba el huesito para atraer al perro que tenía la llave en la boca.
El nivel de felicidad de sentarme y abrir el juego, entrar en ese mundo fuera del mundo real, sumegirnos en islas, ser libres y hacer travesuras (como meterte por la ventana en la cocina del bar de la Scab Island y bardearle la vichyssoise al pobre cocinero).
Casi 10 años después de ese primer LeChuck en mini punto cruz me animé a publicar para la venta los bordados en Regina Azteca y al día de hoy tengo siempre pedidos activos. Pero lo más hermoso es cuando, casi de refilón, me cuentan sus experiencias con el juego: muchas veces me encargan un Guybrush para regalar a un hermano o hermana con quien jugaban en la infancia. Afloran recuerdos y sonrisas, la mejor versión de la nostalgia que me permite conectar mi infancia (esa que viví en soledad) y la infancia de quienes me compran un bordadito.
Pero si a lo largo de nuestras vidas jugamos tantos videojuegos (porque sabemos que el Monkey Island no fue el único), ¿qué hace tan especial a éste? ¿Por qué 30 años después seguimos jugándolo, recordándolo, escuchando su música, repitiendo sus chistes?
No tengo la respuesta a esta pregunta. No la encontré tampoco buscando en Google artículos en blogs, que los hay muchos pero todos se dedican a describir las maravillas de los juegos. ¡Sí! Fueron juegos increíbles, pero ¿por qué sobreviven en nuestro corazón con tanta fuerza? No lo podemos explicar simplemente con calidad gráfica, inteligencia, humor y nostalgia.
Hay algo más.
Voy a espolvorear este artículo con algunas de las experiencias de las mas de 200 personas que respondieron a un pequeño Google Forms que hice circular por diversos foros (tuve respuestas en diferentes idiomas, por lo que algunas de las que aparecen están traducidas).
Se habla mucho de nostalgia cuando pensamos en estos juegos. Será el timing, cuando salió el The Secret of Monkey Island, la mayoría tendríamos entre 5 y 12 años; esa época de la vida donde uno está plenamente consciente, atento y receptivo. En ese momento, resultaba increíble tener la posibilidad de interactuar con tecnología, reírnos con los chistes, descifrar los puzzles, enamorarnos de la música (todavía hoy cuando escucho el tema de Elaine se me aprieta un poquito el corazón), llegar a final y empezarlo de nuevo.
Jugamos a otros juegos. Yo recuerdo al King Quest, por ejemplo. Al Indiana Jones, Loom. Muchos. Pero había algo en el Monkey Island que iba más allá y salía de la pantalla, o mejor dicho, lograba sumergirte en ella y realmente recorrer las islas, conocer a sus habitantes. Algo de la noche perpetua de Mêleé Island, de recorrer sola la ciudad de noche, dar la vuelta, cruzarme con los hombres de baja moral, charlar, seguir camino, entrar en el shop de la Voodoo Lady. Creo que sentía una libertad que a mi edad era imposible de experimentar. Y evidentemente, Guybrush era un personaje lo suficientemente hábil para que nos sintiéramos plenamente identificados con él. Sus aventuras y sus ansias de crecer y ser un temible pirata, eran también las nuestras.
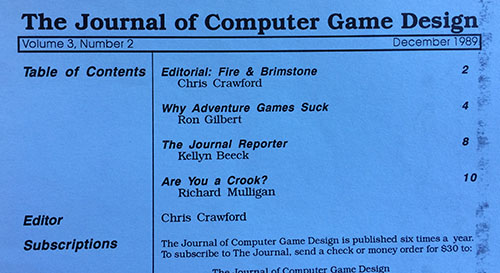
En el blog de Ron Gilbert se encuentra un artículo que escribió en 1989, cuando estaba desarrollando el Monkey Island. Se llama “Por qué las aventuras gráficas apestan”. Ahí dice que prefiere “los juegos en los que el ritmo es lento y la recompensa viene por el ejercicio de pensar y descifrar, más que por la rapidez de los reflejos. Para mí, el elemento que da vida a las aventuras gráficas son las historias en torno a las que se tejen”. Habla de la experiencia inmersiva de un buen juego y su capacidad de absorberte y sumergirte en su mundo, y también de cómo esto se puede romper cuando por cualquier pavada tu protagonista se muere en un accidente (Sierra, ejem). ¿Cómo conseguir un entorno lo suficientemente seguro, que te sumerja, pero que a la vez sea desafiante?
Pienso en el hotel de Scab Island… sabés que no te podés morir, pero ¿se acuerdan de haberse colado en la habitación de Largo LaGrande?, ¿la sensación de que podía entrar en cualquier momento y echarte… o peor? Todavía siento el apuro de revisar su habitación lo más rápido posible, porque venía el loco este, y era de temer.
El Monkey Island fue revolucionario en este sentido, porque todos los juegos anteriores involucraban en algún momento la posibilidad de morir, obligando al jugador a salvar a cada rato. Incluso el Indiana Jones and the Last Crusade, del propio Gilbert tenía estas mecánicas de juego.
Ron en el 1989 mientras estaba cocinando el Monkey Island decía: “Por regla general, los juegos de aventura deberían poder jugarse de principio a fin sin morir ni salvar la partida, si el jugador es lo suficientemente cuidadoso y observador”. Lo incorporó en los siguientes títulos, en ningún Monkey Island no te podés morir.
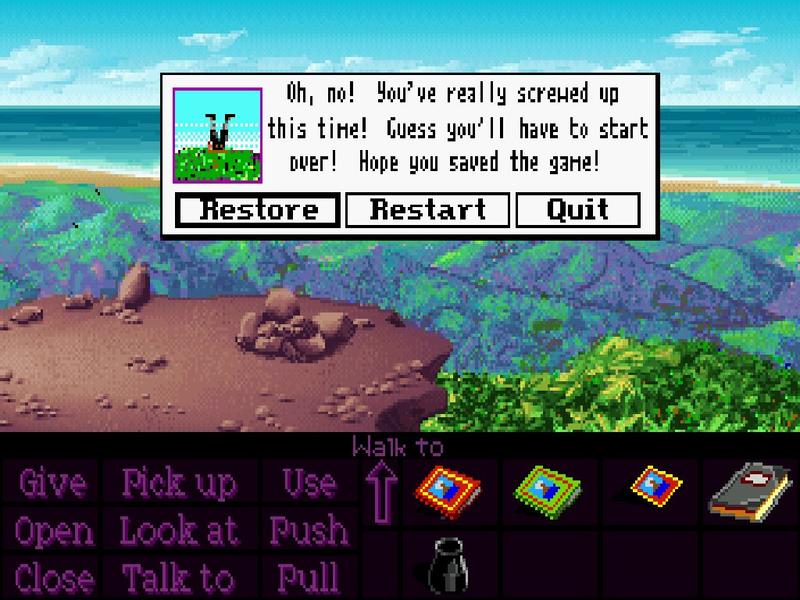
Dave Grossman cuenta que creó la animación del borde del acantilado del que te caés y te “morís” en The Secret of Monkey Island pensando que se había perdido una reunión donde habían inventado un puzzle, porque vió que “había una especie de línea en el borde de la roca” y pensó que era una grieta: “esa misma noche, hice una versión diferente animando la roca para que se cayera, puse toda esta cosa elaborada en la que el acantilado se desmoronaba. Luego inventamos la excusa de que había un árbol de goma ahí abajo en el que Guybrush rebota y sobrevive. Pero no sin antes mostrar la parodia del mensaje de Sierra que dice: ¡Oh no! Lo siento, has muerto. No, ¡jaja! Este no es ese tipo de juego, es un juego de Lucasfilm.”
Para el Monkey Island, LucasFilm Games comenzó a implementar una técnica de gráficos que incluía una especie de trama entre los píxeles llamada dithering, que mezclaba los 16 colores existentes al momento, logrando imágenes con gradiente y profundidad. Los videojuegos anteriores tenían bloques de color sólido (de 8 colores algunos, otros 16) que hacían que los ilustradores, que eran artistas que no se especializaban en computación, tuvieran que explotar la creatividad al máximo, solo para alcanzar imágenes más o menos genéricas.
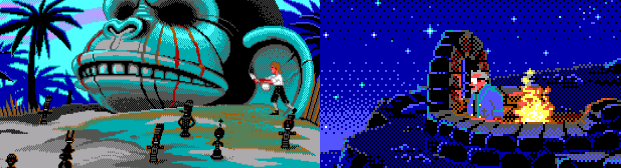
Los desarrolladores del Monkey Island cuentan que una vez que comenzaron a implementar el dithering -gracias al artista atrás de Loom, Mark Ferrari-, los fondos empezaron a verse cada vez más diferenciados; ya no podían repartirse el trabajo entre varios, porque cada artista estaba logrando escenas con un estilo singular. Resolvieron darle los fondos de Mêleé Island y similares a Ferrari, los de la Isla de Monkey Island a Steve Purcell. Una vez que lo divisás, es imposible no darte cuenta de las diferencias de estilo.
“Los escenarios son perfectos, tienen algo veraniego que me da paz. La música caribeña…, jugándolo nunca me siento ansioso, como con otros juegos que estás más alerta o estresado”.
“La hermosa estética nocturna que se mezclaba con el día más adelante en el juego, los sonidos frescos del océano y las estrellas brillando en el cielo”.
“Los escenarios son como un lugar que fui de vacaciones de chico”.

¿Y la música? Mi viejo (el que nos trajo la versión pirateada que le había prestado un compañero de trabajo) tiene, a sus 72 años, de ringtone la intro del Monkey Island. Mencioné antes el tema de Elaine, ¿y la música de Mardi Grass de Booty Island?, la que suena de fondo en el Scumm Bar, el piano del monito en el bar de Scab Island… Es absolutamente memorable y hermosa. El creador de todo esto es Michael Land, un músico amante de la música renacentista que estudió programación y música electrónica en Harvard.
Guybrush Threepwood es también uno de los motivos por los que amamos tanto este juego. Ron Gilbert creó un protagonista que no era un pirata (pero pretendía serlo) en un mundo de piratas: “el jugador también está en esa situación, no es un pirata experimentado. Está muy bien lanzar al protagonista a un mundo que desconoce, porque el jugador tampoco sabe lo que está pasando. Así, ambos pueden aprender al mismo tiempo sobre lo que es ser un pirata. Tanto fue así que la primera frase de Monkey Island es Me llamo Guybrush Threepwood y quiero ser pirata”.
“La idea de un chico común que no tiene nombre, ni porte, ni la barbarie de un pirata quiera ser uno es gracioso. Te hace desear que lo logre”.
“El personaje principal es adorable, se orienta hacia el bien, a menudo fracasa, pero nunca deja de intentarlo”.
Creo que puedo construir algún tipo de respuesta para la pregunta de este posteo. Es la música, los gráficos, la nostalgia, los personajes, el humor, la atmósfera, la temática, todo junto, todo mezclado en un Mix and Mojo inolvidable. Pero hay un elemento más. Mike Ferrari (el del dithering de los gráficos) lo explica de una manera hermosa. Para él, la inmortalidad del juego le pertenece a la historia.
“La razón por la que estos juegos son clásicos, más que el motor SCUMM, o el arte, o cualquiera de los demás aspectos, es porque su ejercicio en la narración era muy bueno. Cuando alguien se sentaba a jugar estos juegos, se veía envuelto en lugares extraños, conocía gente interesante, entablaba relaciones, resolvía puzzles, descubría misterios… Para el jugador, era un gigantesco trabajo de ejercicio creativo mental y emocional”.
“La gente no entiende que toda su existencia se basa en la narración, pero es así”, continúa Ferrari, “quizá ese sea el verdadero secreto de Monkey Island”.
Armando este artículo, me topé con innumerables experiencias interesantes que no quiero dejar afuera. Agrupo algunas y las dejo acá abajo, como testimonio y como carta de amor a este pequeño inmenso universo de piratas.

Sobre la interacción con tecnología nueva:
“Recuerdo el asombro ante la novedad del objeto físico que representa una computadora. Monitores gruesos, curvados y cubiertos de estática, teclados pesados y toscos, todos los ruidos que hacían las computadoras antiguas al crujir, rechinar y zumbar. Además, la diversión sin fin de experimentar y hacer cosas al azar dentro de los juegos… Simplemente vivir en el mundo y caminar y mirar las cosas… Cuando eres adulto, entiendes mucho mejor los objetivos y el propósito de un juego, te centras en progresar y completarlo, pero cuando eres niño, simplemente juegas y lo disfrutas por lo que es en ese momento. No buscas realmente el objetivo de completarlo, ni siquiera entiendes cuál es el propósito del juego, simplemente existes en el mundo, vives con tu propio mundo”.
“Recuerdo muy bien la primera vez que jugamos. Mis padres y yo nos quedamos absolutamente atónitos con el sonido y los gráficos. Nos reímos mucho, ese tipo de juegos y humor eran totalmente nuevos. Tener un PC fue una sensación revolucionaria. Debido a las leyes sobre el juego en Alemania, en los años 90 no había salones recreativos donde los niños pudieran jugar (por ley, las máquinas recreativas tienen que estar al lado de los tragamonedas de los casinos, donde no se admiten niños por razones obvias). Había que ser lo suficientemente rico como para tener una consola y un televisor en color, o bien tener dinero y conocimientos de inglés y tecnología para un PC. Mis padres eran bastante pobres y no tenían conocimientos, pero estaban convencidos de que su única hija necesitaba crecer con esta tecnología que pronto se convertiría en algo importante. Los juegos eran lujosos y, sobre todo, jugar con una PC era algo más bien de adultos, de ricos, algo muy raro para los niños de mi edad en aquella época. Y comparado con los juegos de Gameboy o NES que conocíamos por los vecinos, para nosotros era una era de entretenimiento totalmente nuevo. Un amigo de mi padre le prestó su copia de MI, no teníamos videojuegos propios. Cuando pienso en cuando jugué MI por primera vez, hay una mezcla de emociones absolutamente salvaje, la emoción por conseguir una PC por nuestra cuenta, las cosas mágicas que ocurrían en la pantalla, la alegría por conseguir por fin que todo funcionara y pasar un raro tiempo libre con mis padres, que trabajaban duro, y hacían todas estas cosas raras de las que no tenían ni idea y estaban totalmente estresados por ello, sólo por mí”.
“Mis viejos le compraron una compu usada a alguien, era de esas que la CPU era ancha y bajita. Nos la dieron para el día del niño de 2002. Cuando la chusmeamos para ver qué tenía en las carpetas del disco C, encontramos dos ejecutables que decían monkey.exe y monkey2.exe. Ejecutamos el primero y no podíamos creer que la compu haya venido con jueguitos instalados. Fue el mejor día del niño del que tengo recuerdo”.
“Tenía una Amiga 500 y era hija única: Guybrush me hacía un montón de compañía”.
“Jugar al MI 1 en la casa de unos compañeros del colegio, en un monitor monocromático. tratando de llevar el grog en los vasos hasta la cárcel”.
Sobre las mecánicas de juego:
“Recuerdo que fue el primer juego que me contaba chistes de verdad. También que me contaba una historia. En definitiva, fue el primero que estaba escrito, dirigido y fotografiado como si fuera una película. El primero que se sentía como arte. Fue el primer mundo complejo con el que pude interactuar y sentir que lo habitaba”.
“En comparación con Maniac Mansion, Gilbert había añadido dos nuevos sistemas en el juego que te daban pistas sutilmente. Uno eran los árboles de diálogo: si charlas con la gente hasta agotar el diálogo, suelen darte pistas. Otro es el sistema de dinero”.
“Es una clase magistral de buen diseño y estética. Incluso si no sueles jugar a aventuras point and click, el arquetipo del pirata es reconocible al instante, y el tipo de humor es muy universal. Es la definición del encanto”.
“Es una obra única, realizada por muy buenos desarrolladores, diseñadores y compositores de música que fueron pioneros en lo suyo. Todos ellos dispusieron de una enorme cantidad de tiempo y dinero para terminar el juego. Fueron totalmente libres en sus decisiones y crearon un producto en el que todo encaja a la perfección”.
Anécdotas preciosas:
“Me gustaban los diálogos, pero me daba miedo LeChuck”.
“Jugábamos con mi tía y mi hermana al MI1, y nos quedamos atascadas en un puzzle durante horas. Mi abuela, que pasaba por la habitación con un cesto de la ropa sucia, sugirió usar el pollo de goma para resolver el puzzle. Al principio lo descartaron por ser una vieja que no entendía de juegos y pensaron que la idea era descabellada, pero finalmente utilizaron el pollo de goma para ver si resolvía el puzzle. Como no esperaban que ocurriera nada, no lo podían creer cuando oyeron que la memoria del viejo PC giraba, indicando que algo nuevo estaba a punto de ocurrir. Así es como mi abuela nos ayudó a pasar el Monkey Island”.
“Solía intentarlo todo, a veces dándole vueltas en la cama antes de irme a dormir. Una vez me desperté con la solución (que más tarde se demostró correcta) al puzzle del gran árbol de Booty Island en el MI 2”.
“Iba al puesto de diarios y le pedía al kiosquero si podía darle un vistazo a las revistas PC JUEGOS que tenían soluciones”.
“Mi padre tenía un amigo que lo había jugado y lo mandaba al bar con preguntas. Al final del juego creo que llamé dos veces al teléfono de pistas”.
“Nos llamábamos por teléfono con nuestros amigos, a veces a altas horas de la noche, para disgusto de nuestros padres”.
“Tenía una copia pirata. No se podía guardar la partida, así que había que empezar desde el principio”.
“Le tenía un miedo tremendo a LeChuck al final del MI2”.
“Mi hermana y yo éramos tan pequeñas que no sabíamos leer. Nos sentábamos en el regazo de mi padre y él nos leía todos los diálogos. Nos turnábamos para clickear el mouse”.
“Recuerdo que mi padre trajo The Secret of Monkey Island a casa porque alguien del trabajo se lo había mencionado. El juego era una copia pirata, en blanco y negro y sin sonido. Me gustó tanto que mi padre me compró una copia legal, y luego Lechuck’s Revenge. Cuando tenía unos 7 años me hice un Guybrush enorme de cartón y me lo llevé al colegio; otra niña le dibujó un pañuelo y me hizo llorar. Guybrush y Elaine se convirtieron en mis amigos imaginarios durante varios años. Siempre he tenido una intensa cercanía a los juegos, y sé que siempre la tendré”.
“¡El miedo que me daba la forma en la que caminaba LeChuck en el MI2!”
“Si quisiera contar una anécdota, se me viene a la mente mi padre leyéndome los diálogos cuando era muy chico y que en vez de decir “LeChuck” decía “Lecuk”. Así que para mí, durante muchos años fue Lecuk”.
“Las veces que veía jugar a papá y le daba sugerencias. El libro con las soluciones, la rueda de papel, la computadora vieja”.
“Compartir con amigos dónde había llegado o se había bloqueado cada uno”.
“Para un chico que jugaba solo, resolver los puzles podía llevar mucho tiempo. A veces te quedabas atascado durante semanas, entonces imaginabas cómo sería la continuación de la historia, el final…, y casi escribías una historia sobre lo que habías imaginado”.
“Volver del colegio y jugar con mi hermana intentando hacer de todo para avanzar con lo historia”.
“Me divertía mucho y siempre lo jugábamos con mi hermanita, yo al teclado obvio”.
“Recuerdo estar ratos largos en la compu con mi papá jugando los fines de semana, él intentando descifrar los acertijos, yo de a ratos ayudaba pero me entretenía más con los fondos, la música y los personajes. Amaba a Stan, todavía hoy lo tengo de referencia para describir a personas demasiado expresivas. También recuerdo preguntarle a mi papá sobre cosas que aparecían o qué significaban algunas palabras (como almorranas jaja)”.
“Días de hablar por teléfono con un amigo, pasando el juego entre los dos, cada uno desde su casa con su computadora, probando cosas y tratando de avanzar a dúo”.
“Fue mí primer juego de chica casi repito tercer grado por quedarme despierta jugando toda la noche. Entonces me dormía en clase. Aprendí palabras en inglés porque teníamos esa versión pirateada y en el colegio se pensaban que era muy inteligente y bilingüe”.
“La experiencia de jugar sin una guía. En ese tiempo las aventuras gráficas eran muy desafiantes ya que no había muchas pistas dentro del mismo y una vez que lograbas un avance por pequeño que sea era una sensación de triunfo increíble”.
“Recuerdo mí familia reírse intrigada al escucharme hablar por teléfono de un pollo de goma con polea”.
Escribí este artículo basándome en experiencias personales propias y de muchos desconocidos en internet, además rescaté entrevistas a los desarrolladores de un documental de oneretrotip en YouTube, y utilicé fragmentos del blog de Ron Gilbert, grumpygamer.






 .
.
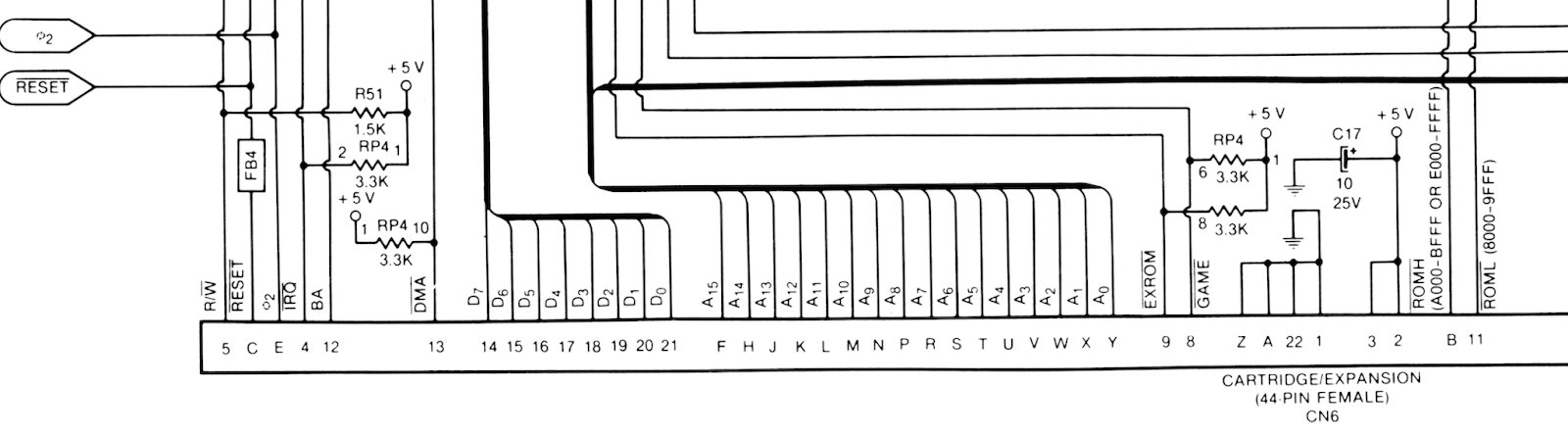
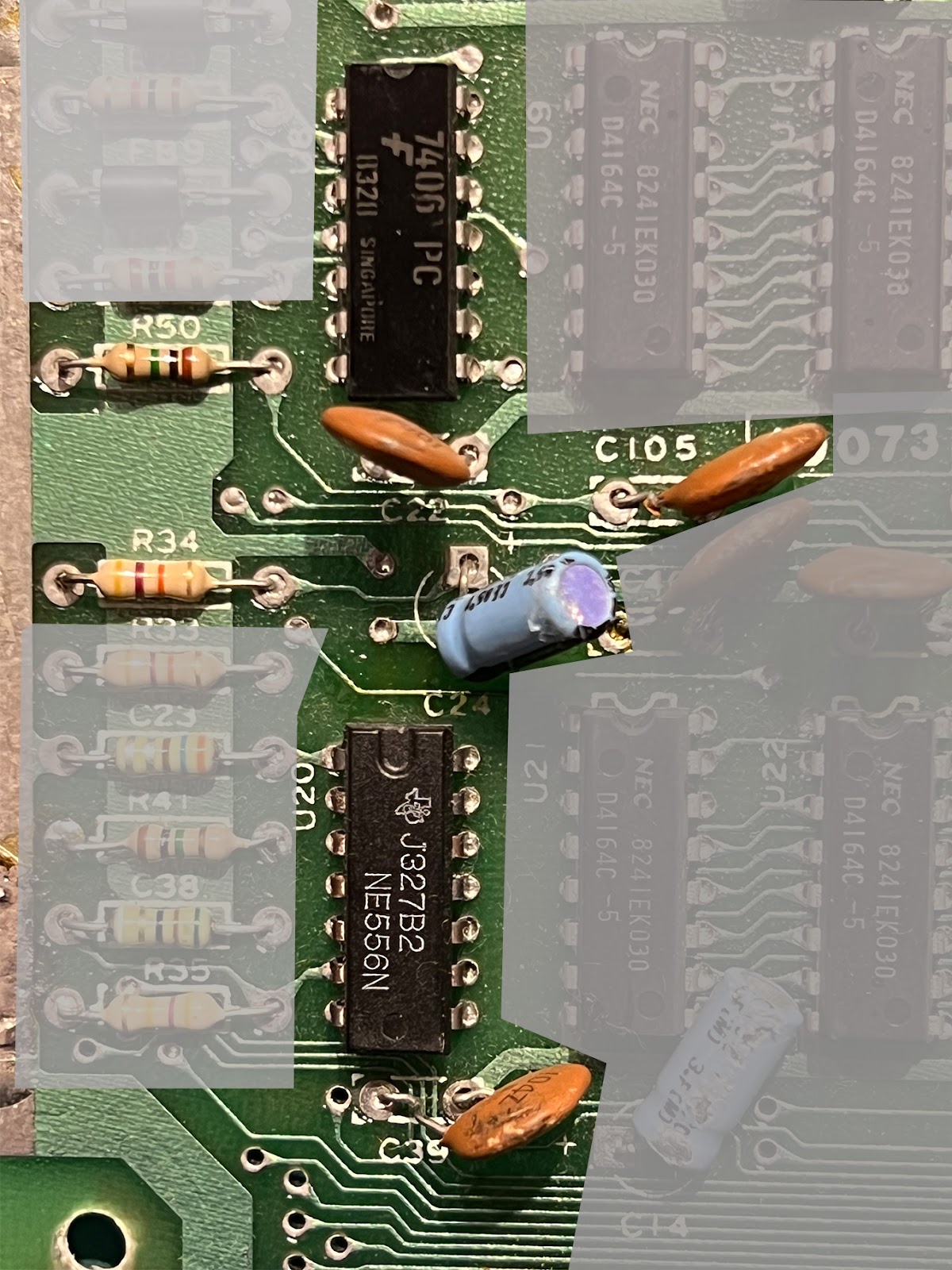
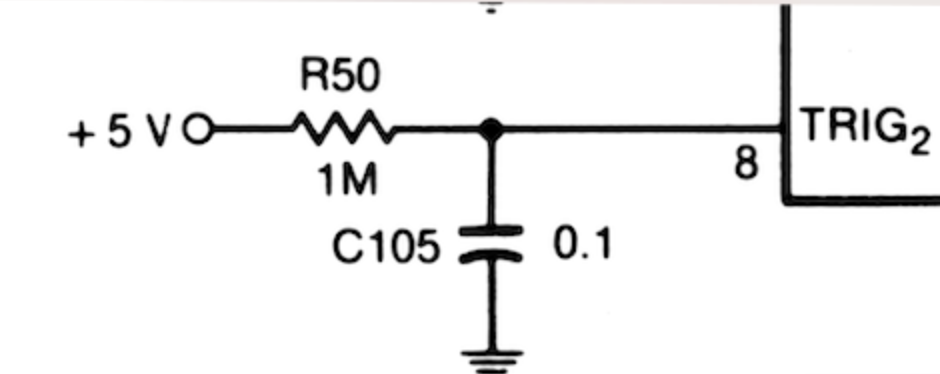
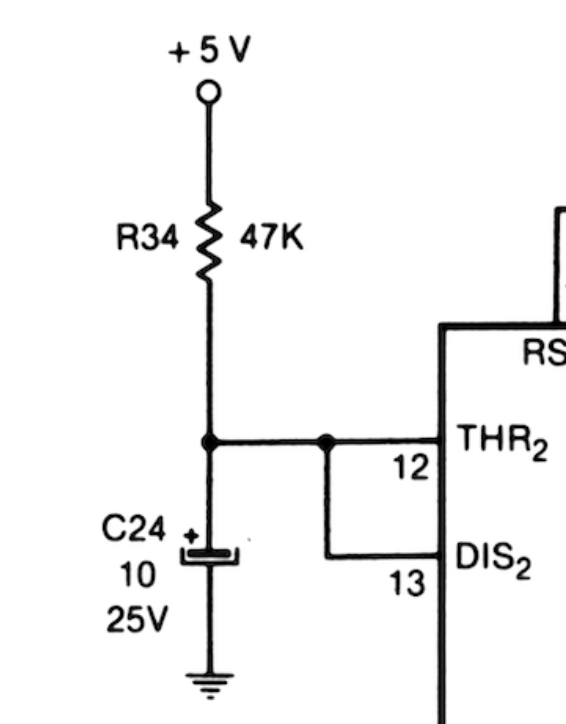
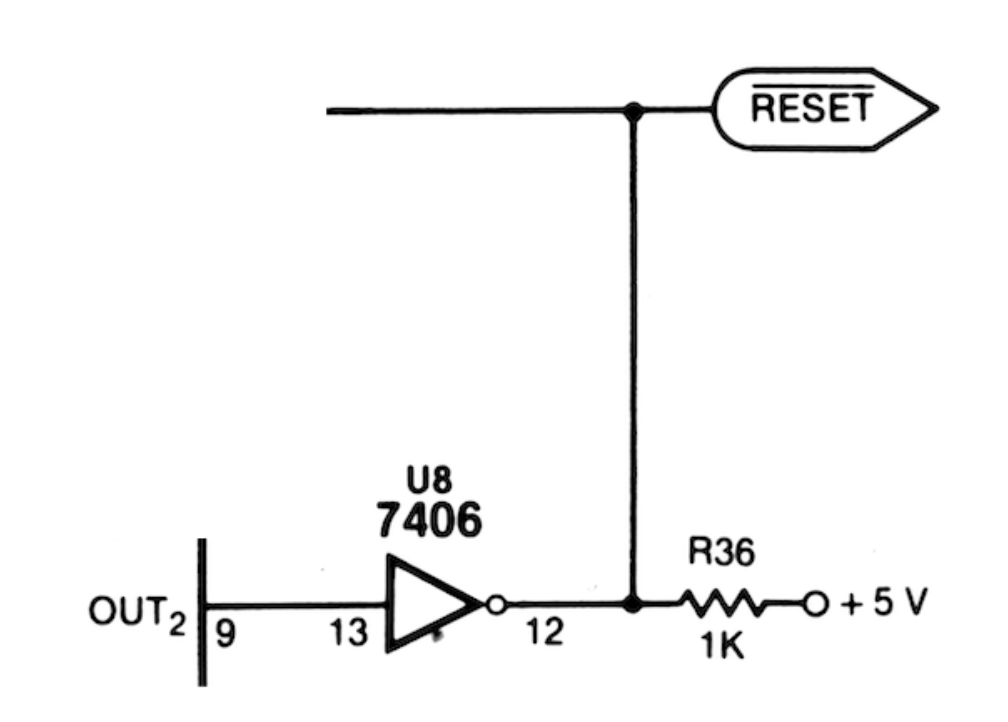
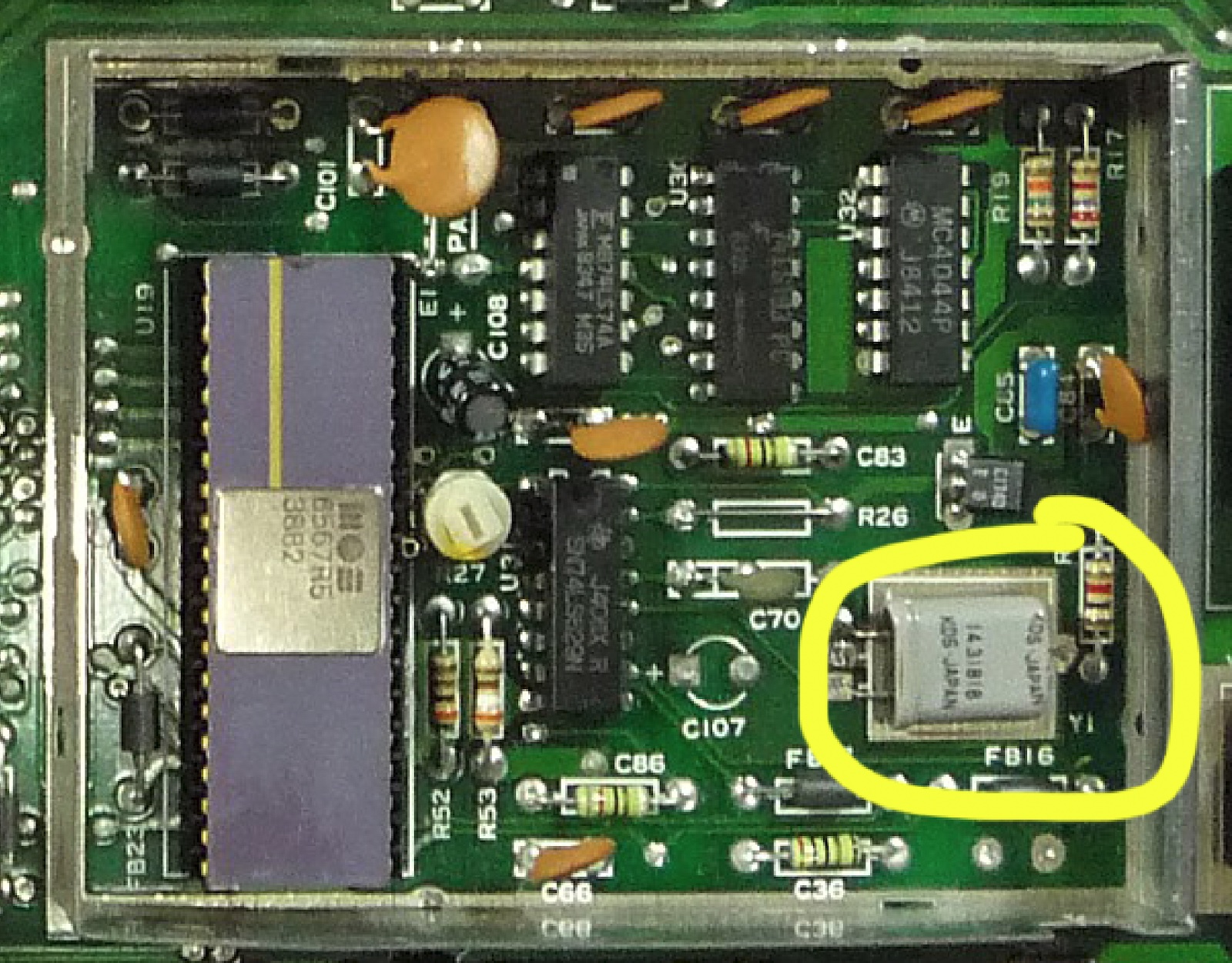
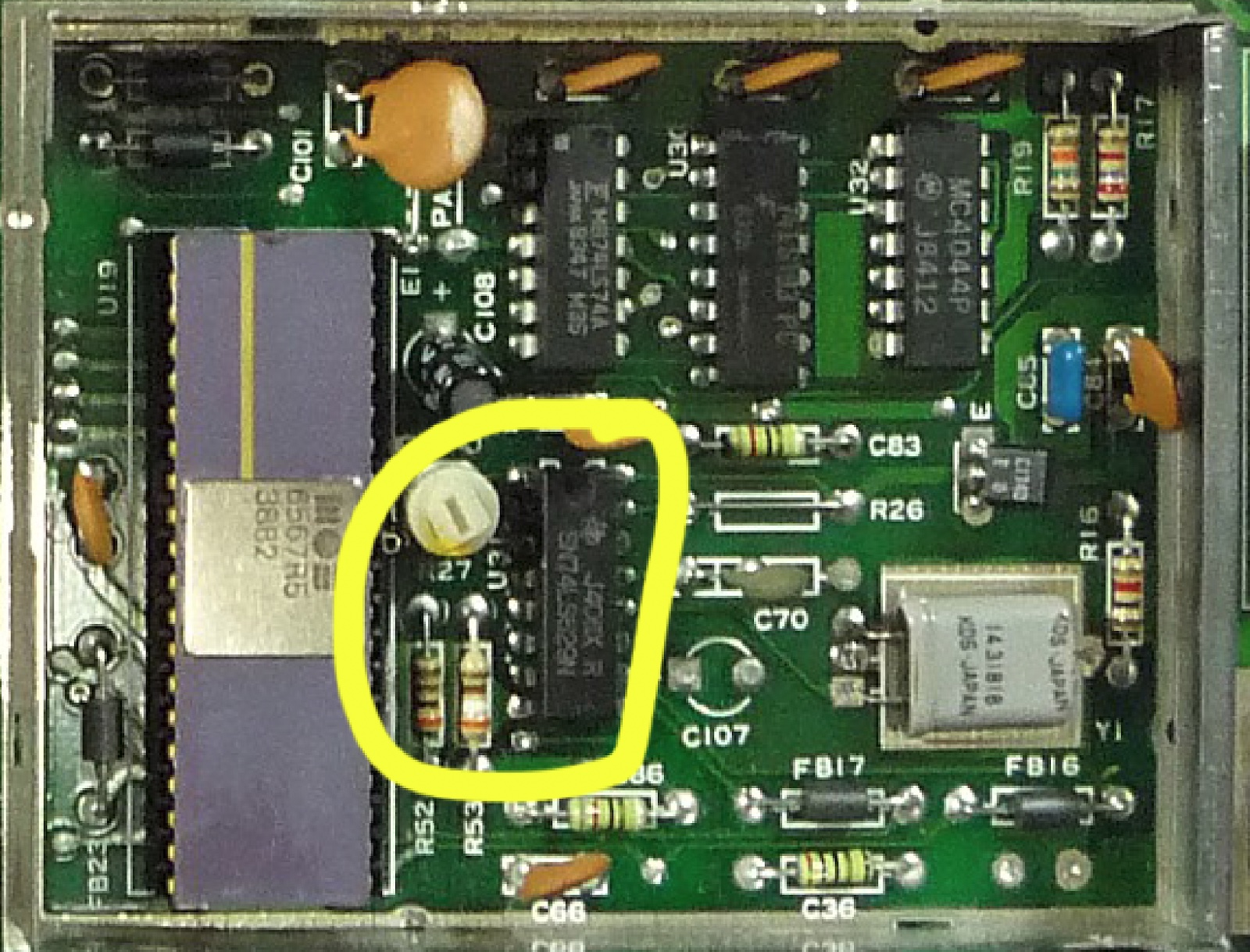
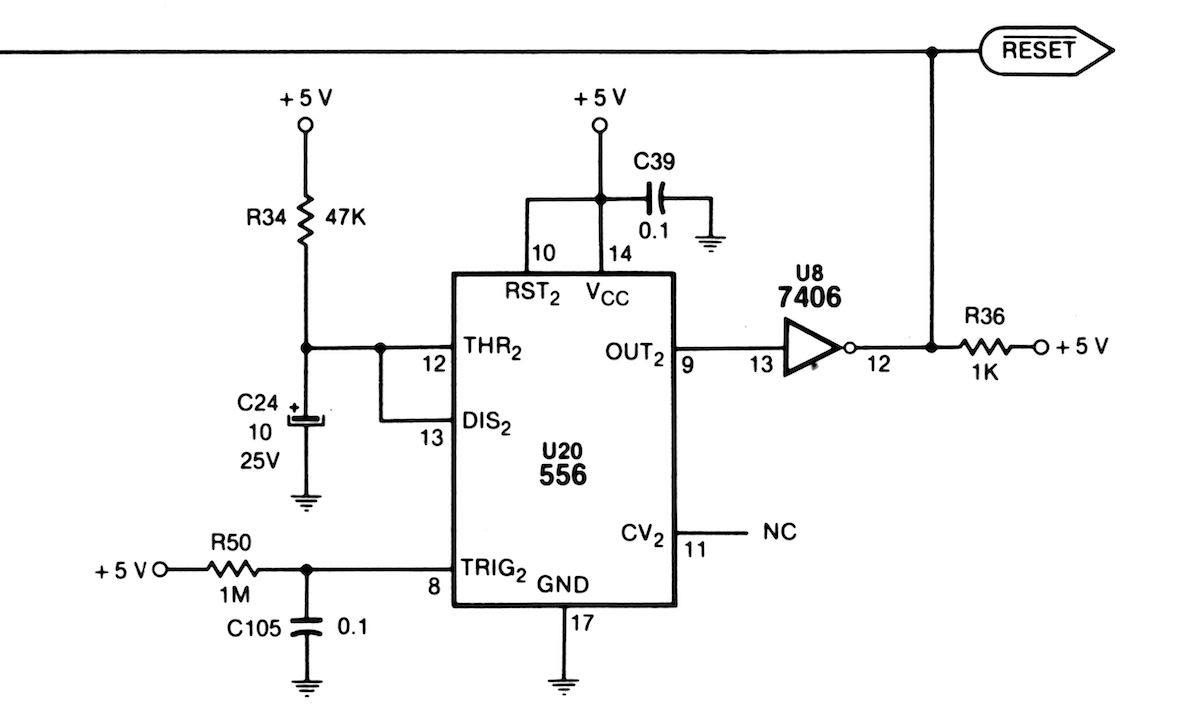 El 556 (componente U20) está cableado en forma monoestable lo que significa que por cada vez que es activado a través de su pin de trigger envía un pulso a través de su pin de output. Este circuito es activado solo al encender la computadora y después no vuelve a funcionar en la Commodore. Al ser dos timers 555 vamos a mirar la parte derecha del mismo, los pines con el número 2 que son los que forman parte del circuito de reset.
El 556 (componente U20) está cableado en forma monoestable lo que significa que por cada vez que es activado a través de su pin de trigger envía un pulso a través de su pin de output. Este circuito es activado solo al encender la computadora y después no vuelve a funcionar en la Commodore. Al ser dos timers 555 vamos a mirar la parte derecha del mismo, los pines con el número 2 que son los que forman parte del circuito de reset.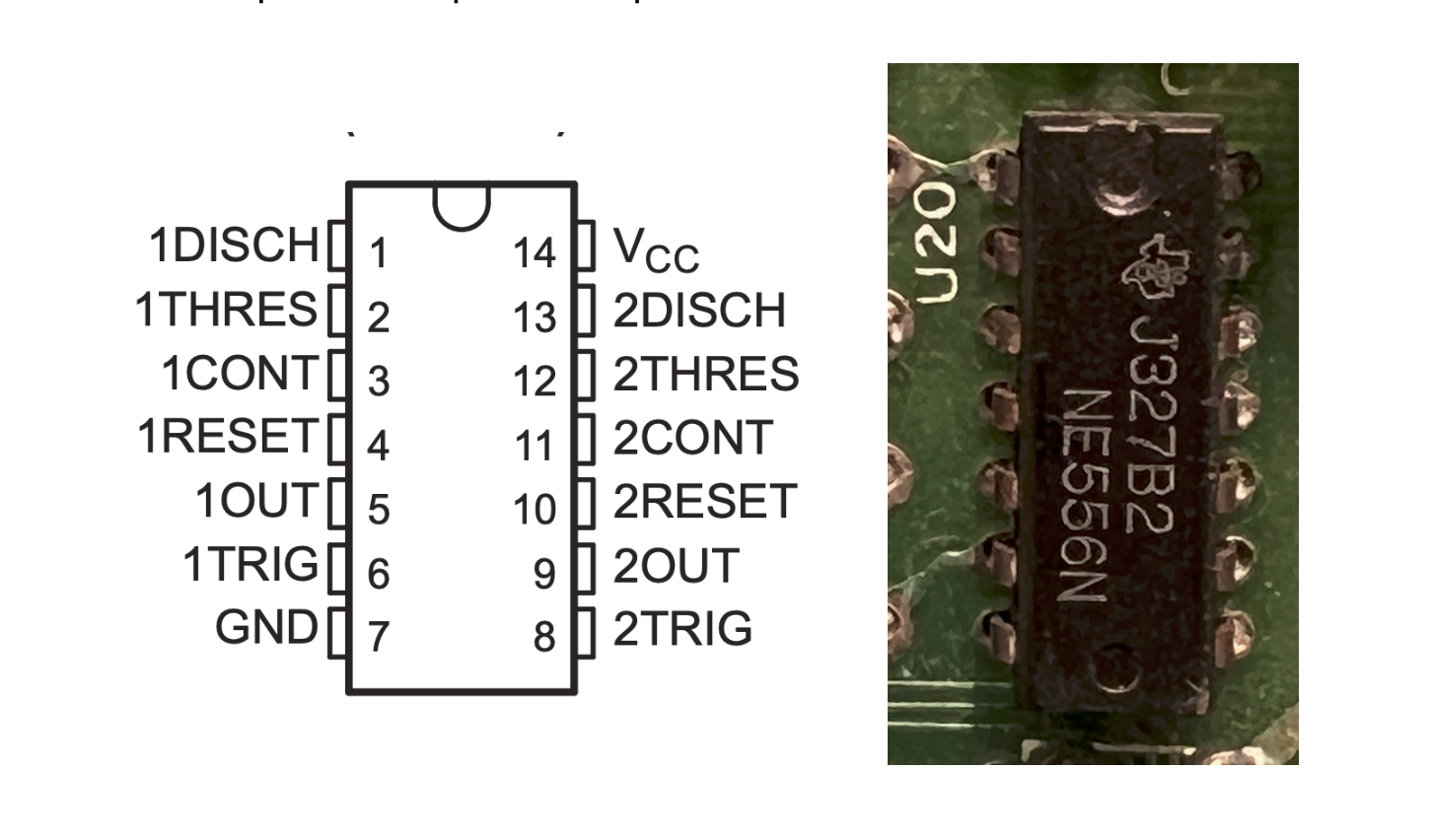

{kind=link}