Vamos a empezar este estudio comparativo del 6502 vs el 6510 con una descripción del para qué sirve cada patita de estos chips (que básicamente es el pin out). Nos va a servir de guía para poder hablar de las diferencias que tienen estos chips entre sí
Les dejo el link al articulo anterior en la serie, y al final como siempre los links a todos los artículos de la misma.
Cosas en Común entre el 6502 y el 6510
Ambos chips fueron creados por MOS Technologies y muy utilizados en el final de los 70 y principios de los 80. El 6510 ya no se fabrica más en la actualidad (escribiendo estas notas en Junio del 2023) sobreviviendo sólo en los corazones de millones de Commodore 64 y en los corazones de miles de Commodorianos.
El 6502 todavía sigue siendo muy utilizado teniendo versiones actuales de USM y de WDC siendo la versión actual la 65C02 que agrega algunas instrucciones extras de assembler y baja mucho el consumo eléctrico.
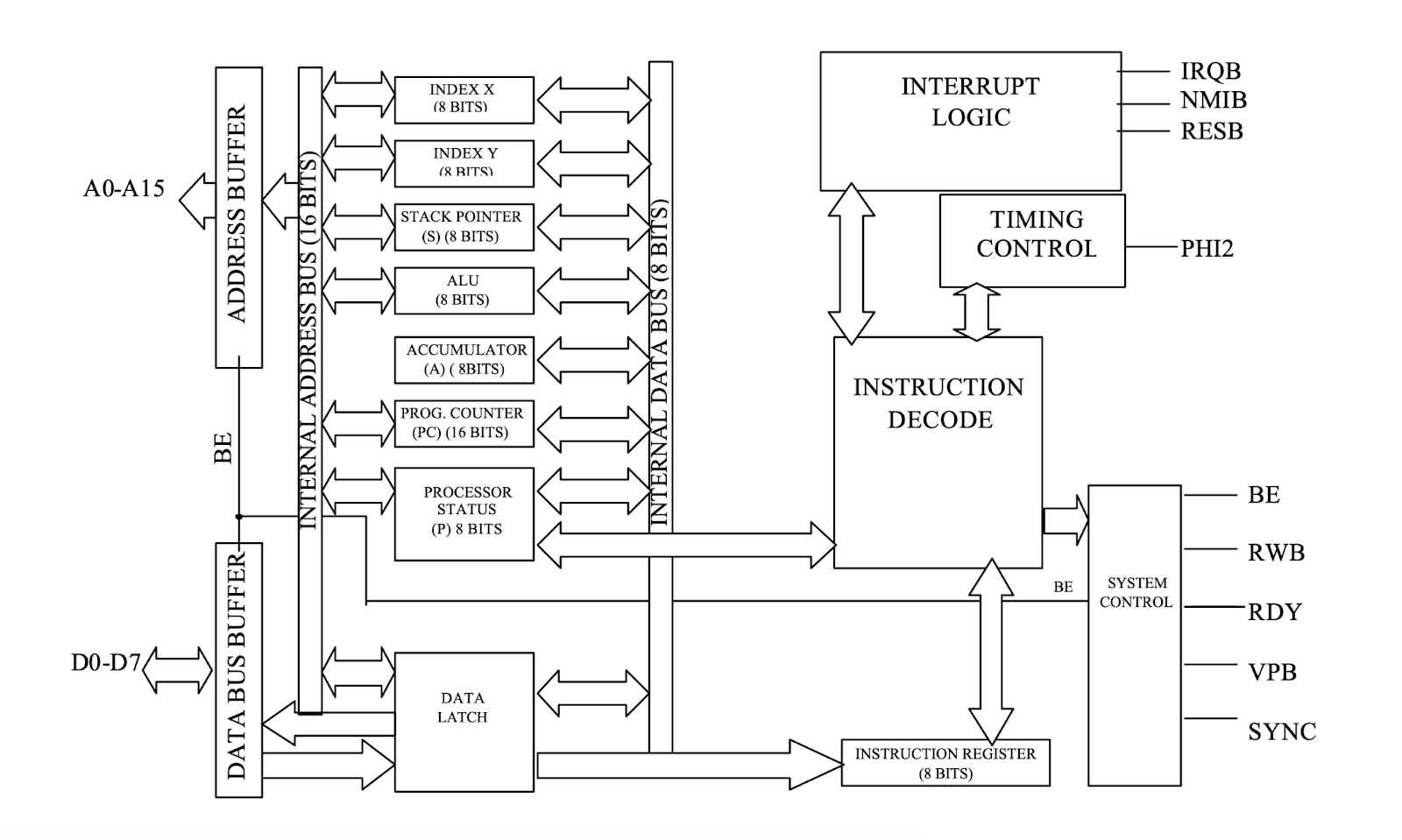
Arquitectura
Ambos procesadores son procesadores de 8 bits y comparten muchísimas cosas en común. La arquitectura interna de estos procesadores es idéntica y está dividida en dos partes una sección con los registros y otra con las operaciones de control, las señales que provocan transferencias de datos están en la sección de control.
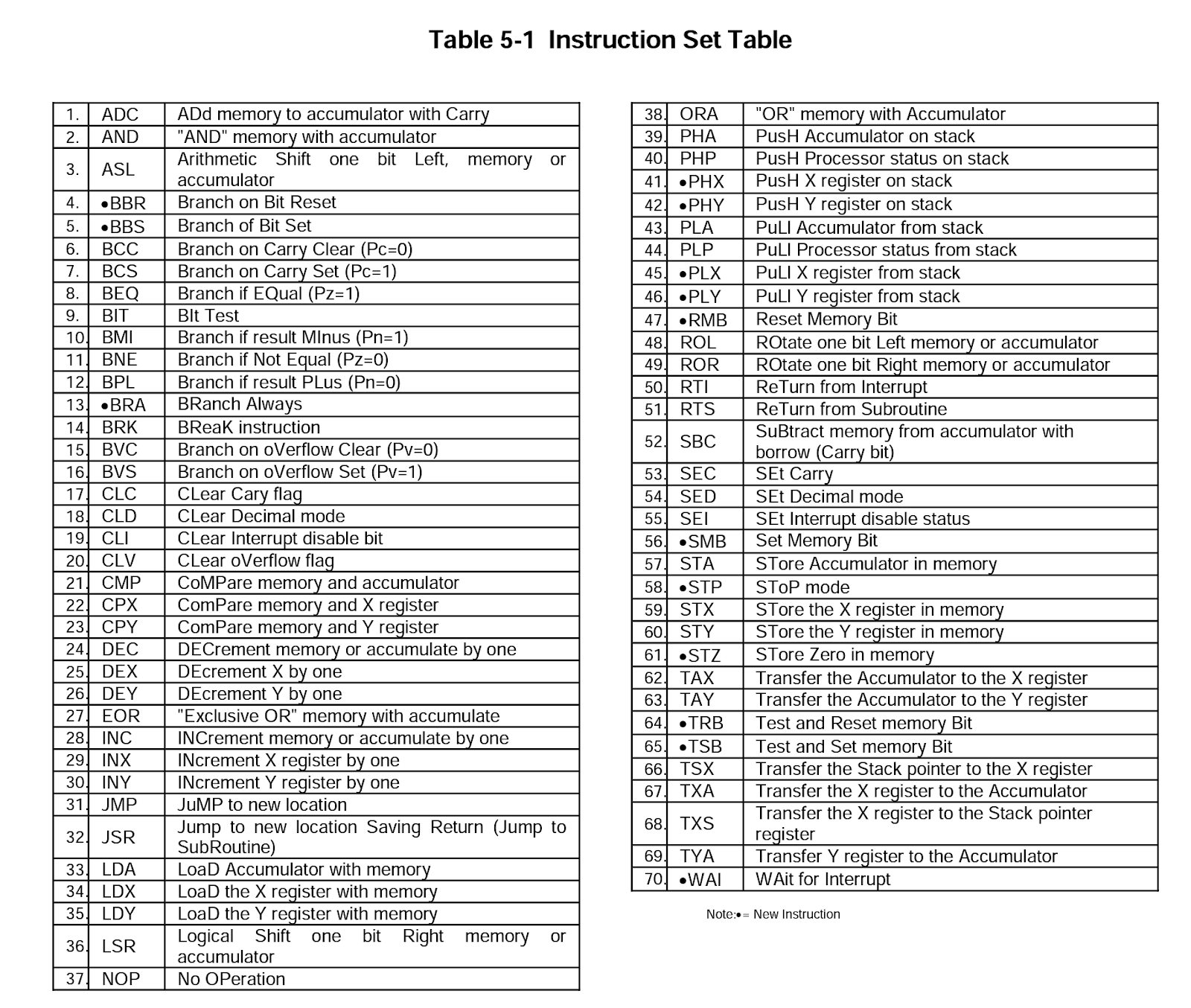
Set de instrucciones
El código máquina de ambos procesadores posee las mismas instrucciones de assembler de 6500 con lo que los programas de uno funcionan perfectamente en el otro.

Agrego algunas instrucciones extras del modelo 65C02 (las marcadas con punto en la siguiente tabla) que NO recomiendo usar para poder mantener compatibilidad con el 6510 y el 6502 originales pero que ahorran algunos pasos al no tener, por ejemplo, que pasar por el acumulador para guardar el registro X en el stack con la instrucción PHX. El 65C02 es una versión más moderna del MOS 6502 siendo una ventaja el ser fully static por lo que se puede parar el clock y los registros no pierden sus valores.
Velocidad de Reloj
Los procesadores 6502 y 6510 originales soportan una velocidad de reloj de hasta 1Mhz, teniendo luego el 8502 que soporta hasta 2Mhz (usado en el modo 64 de la Commodore 128)
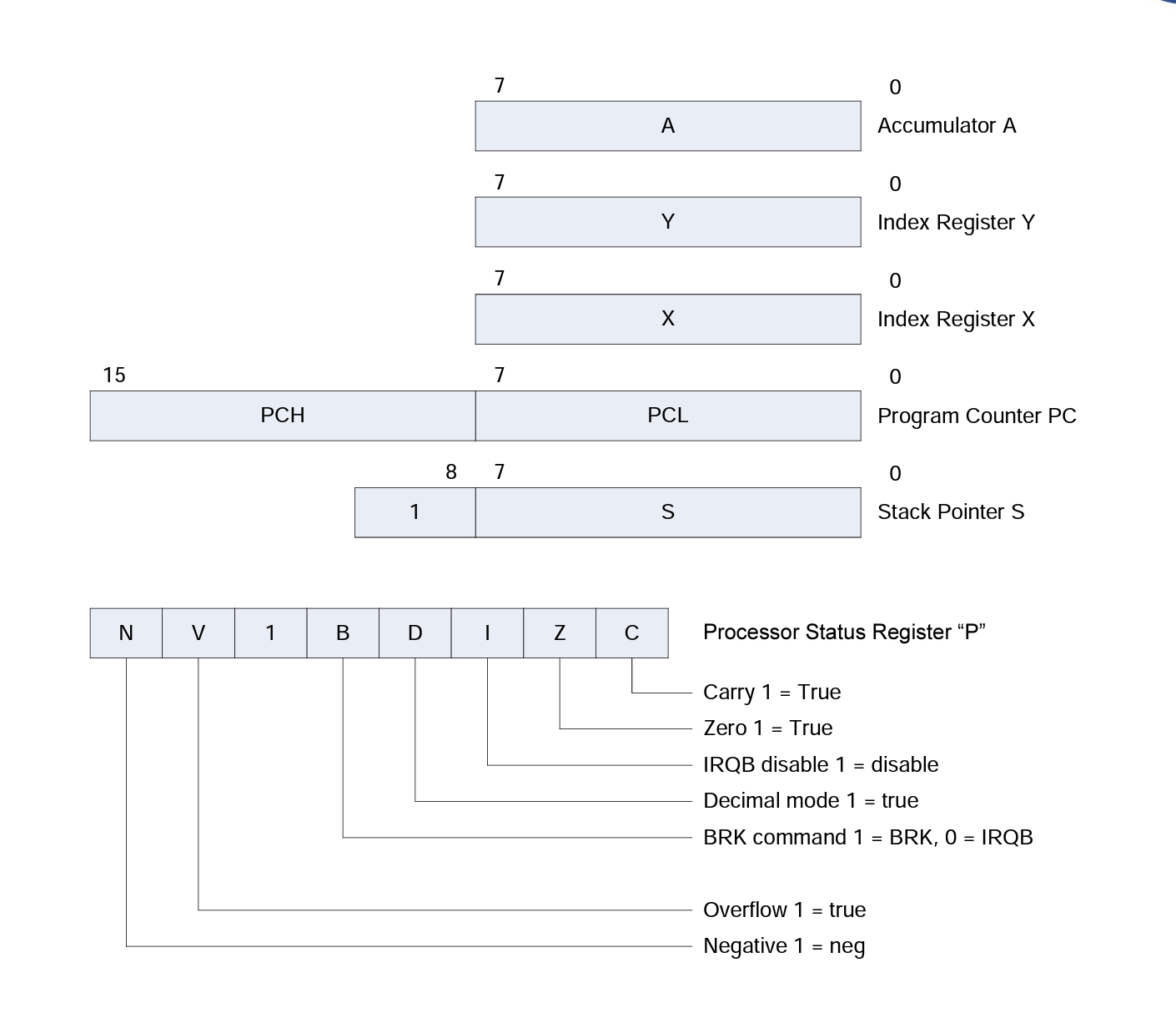
Registros
La cantidad de registros y la forma de accederlos se mantienen para toda la familia estos son los familiares A, X e Y, el Status Register y el Stack Pointer los 5 de 8 bits y el Program Counter de 16 bits.
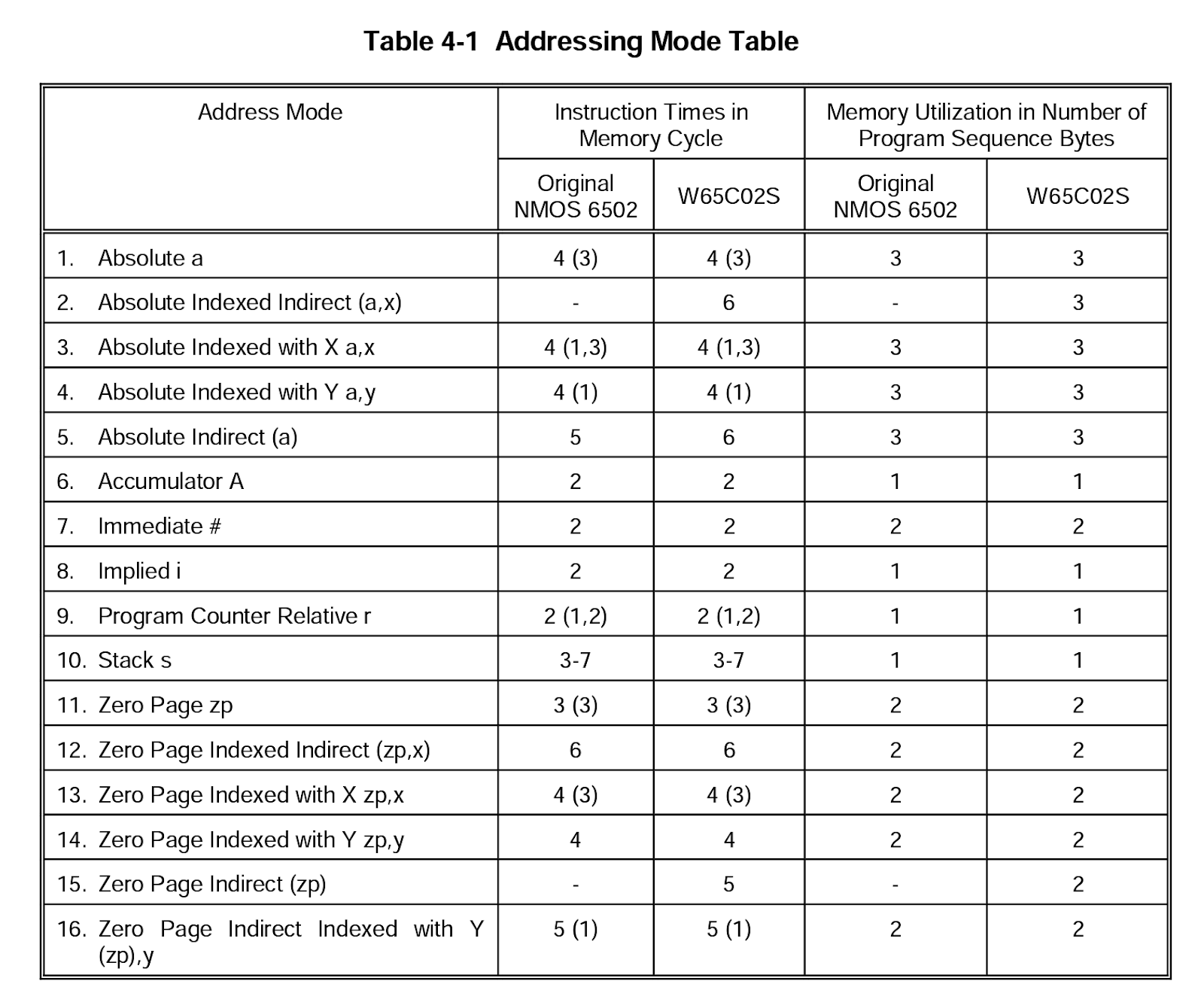
Modos de direccionamiento
Ambos chips funcionan de idéntica forma al relacionar la memoria y sus registros presentando modos de direccionamiento diferentes ya sea si uno quiere cargar directamente de memoria, o un número literal al acumulador, en forma indexada los datos y aplicar funciones que trabajan con el acumulador sin tocar memoria.
Bus de Direccionamiento y Bus de Datos
Ambos procesadores poseen 16 líneas de direccionamiento de datos (pines) pudiendo manejar entre memoria y registros de I/O hasta 64Kb (2ˆ16 = 65536 bytes).
Pin-Out y diferencias
Aquí salta a la vista la diferencia más grande ya que el 6510 posee 6 pines adicionales que puede ser utilizados como interfaz de Input/Output para comunicarse con periféricos ya que estos son bidireccionales.
Para manejar estos pines el 6510 utiliza las direcciones 0 y 1 donde especifica en la cero si son inputs (pone un cero) o output (pone un 1) y en el dirección 1 los valores de los mismos, ya sea recibidos de un periférico y escritos por el procesador para consumo externo.
Pin-Out 6502
Este chip posee un formato DIP 40 con las siguientes funciones en sus pines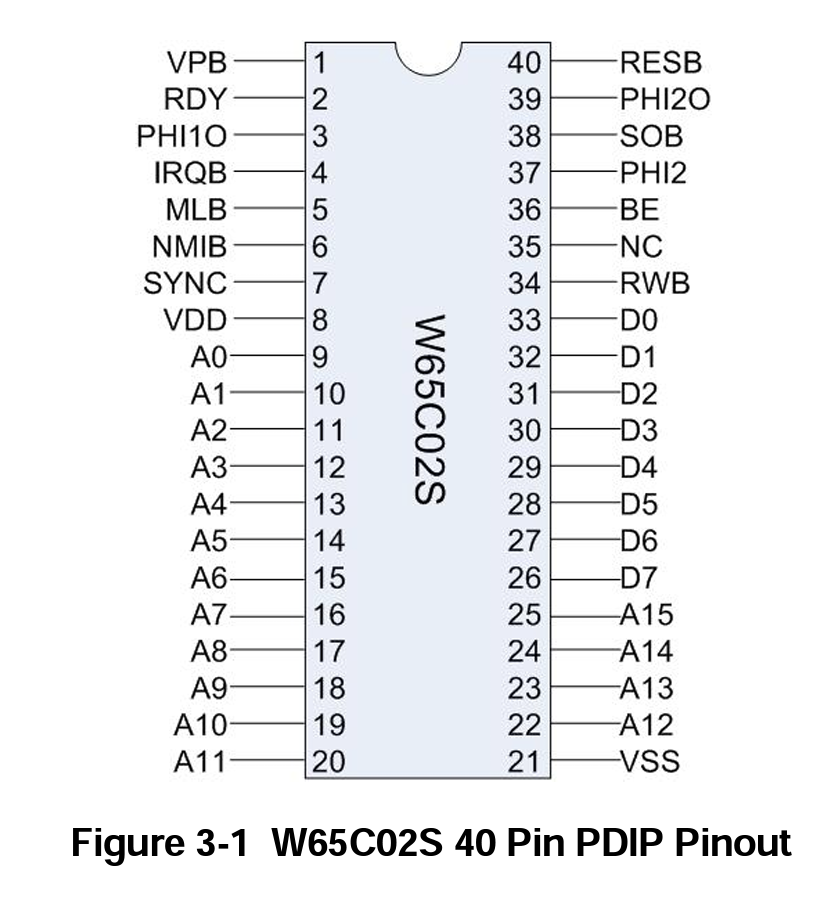
VPB Pin de La B significa Bar o Barra para que este pin se active el voltaje tiene que ser Low o 0v
RDY El pin ready se utiliza para decirle al microprocesador que tiene que frenar y mantener al mismo en el estado actual, para activarlo y que frene el pin espera un estado low. Por ejemplo al recibir un estado Low (o volts) en el pin todas las líneas de output van a mantener los valores de corriente que tenían mostrando qué dirección estaban buscando.
PHI1 o 01 (OUT) Pin de Salida de Reloj, el mismo es una salida de reloj para conectar a otros dispositivos. El PHI1 es típicamente la señal del PHI2 pero invertida
IRQB Pin de interrupción. Al conectar este pin a 0V, si las interrupciones están habilitadas, el procesador guardará el contenido de los registros actuales y buscará en las posiciones de memoria FFFE y FFFF donde está el vector (otra posición de memoria) que posee la primera instrucción a ejecutar para atender a esta interrupción
MLB El pin de Memory lock se usa para mantener la integridad de las instrucciones Read-Modify-Write en un sistema multiprocesador. Cuando presenta un valor Low o 0 volts indicate que algún otro circuito debe arbitrar el ciclo del bus.
NMIB Pin de interrupción no enmascarable. Al conectar este pin a 0V el procesador guardará el contenido de los registros actuales y buscará en las posiciones de memoria FFFA y FFFB donde está el vector (otra posición de memoria) que posee la primera instrucción a ejecutar para atender a esta interrupción. Este tipo de interrupción es incondicional y siempre será honrada.
SYNC Pin de sincronía El ciclo del procesador donde trae el código de operación (OpCode) se indican con el pin SYNC en high. Cuando el procesador busca un código del operación el pin queda en high y queda high por todo el resto del ciclo
VDD o VCC Pin de Energia. El procesador típicamente trabaja con +5v
AB0 a AB11 Pines del Bus de Direccionamiento. Son pines bidireccionales que permiten recibir las direcciones de los dispositivos a los cuales comunicarse (memorias, otros chip en la placa, registros de I/O, etc). Al ser un bus de 12 bits direcciona hasta 4096 bytes o desde $0000 hasta $1000
VSS Pin de Ground, este pin se conecta al common ground del diseño.
DB0 a DB7 Pines del Bus de datos, Este es un bus bidireccional que permite recibir y escribir datos junto con el bit de R/W a memorias y registros de I/O
R/WB Pin de Lectura/Escritura. Este pin indica si el procesador está realizando una lectura o una escritura. Cuando se encuentra en 1 o en estado High el procesador está realizando una lectura cuando está en 0 o estado Low una escritura.
NC No Connect, este es un pin que no se debe conectar ya que no está conectado a nada dentro del procesador
BE Pin de Bus Enable, cuando este pin esta High los pines de address, data y RW están activos, cuando está low quedan con impedancia alta sacando al procesador del bus.
PHI2 o 02 (OUT) Pin de Salida de Reloj, el mismos es una salida de reloj para conectar a otros dispositivos
SOB Pin de Set Overflow. Este pin cuando recibe un cambio de high a low prende el bit de Overflow en el Status Register del procesador (bit 6). No se uso mucho en el pasado y no se recomienda su uso.
PHI0 o 00 (IN) Pin de entrada de Reloj, Este pin permite conectar un reloj interno al procesador para sincronizarse con otros dispositivos.
RESB Pin de reset, este pin sirve para realizar un reset del procesador cuando se conecte a 0v. El reset tomará 7 ciclos de reloj y buscará en las posiciones de memoria FFFC y FFFD donde está el vector (otra posición de memoria) que posee la primera instrucción a ejecutar. El reset debe ser mantenido en 0v por lo menos durante dos ciclos de reloj para que sea reconocido.
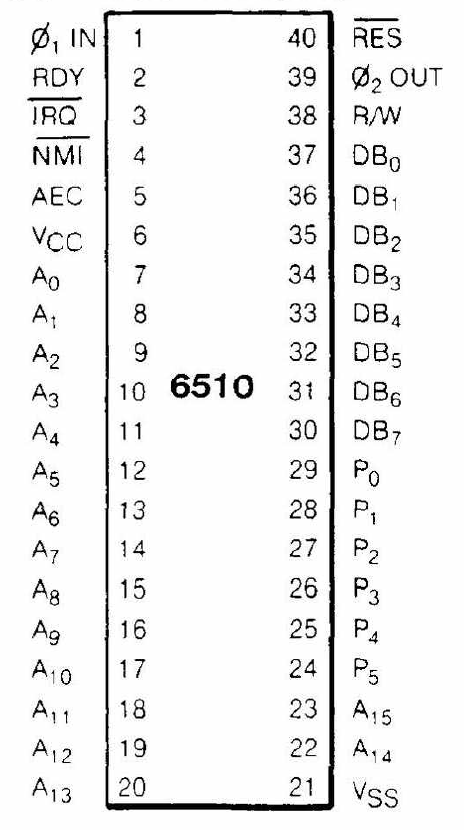
Pin-Out 6510
Pines diferentes al 6502
PHI1 o 01 (IN) Pin de entrada de Reloj, Este pin permite conectar un reloj interno al procesador para sincronizarse con otros dispositivos. En el 6502 era el PHI0 y el 6510 sólo tiene 2 pines con respecto al reloj en lugar de los 3 que posee el 6502.
AEC Pin de Address Enable Control, se comporta de forma similar al pin de Bus Enable del 6502. Cuando este pin esta High los pines de address, data y RW están activos, cuando está low quedan con impedancia alta sacando al procesador del bus. Esto permite desarrollar sistemas con acceso directo a memoria por parte de otros chips o periféricos (DMA).
P0 a P5 Pines de I/o Port. Este procesador en su más marcada diferencia presenta en estos pines 6 conexiones bidireccionales con periféricos como si fuera un pequeño VIA o CIA. Vamos a explorar como funciona en detalle en un futuro artículo y video.
Pines idénticos al 6502
RDY El pin ready se utiliza para decirle al microprocesador que tiene que frenar y mantener al mismo en el estado actual, para activarlo y que frene el pin espera un estado low. Por ejemplo al recibir un estado Low (o volts) en el pin todas las líneas de output van a mantener los valores de corriente que tenían mostrando qué dirección estaban buscando.
IRQ/ Pin de interrupción. Al conectar este pin a 0V, si las interrupciones están habilitadas, el procesador guardará el contenido de los registros actuales y buscará en las posiciones de memoria FFFE y FFFF donde está el vector (otra posición de memoria) que posee la primera instrucción a ejecutar para atender a esta interrupción
NMI/ Pin de interrupción no enmascarable. Al conectar este pin a 0V el procesador guardará el contenido de los registros actuales y buscará en las posiciones de memoria FFFA y FFFB donde está el vector (otra posición de memoria) que posee la primera instrucción a ejecutar para atender a esta interrupción. Este tipo de interrupción es incondicional y siempre será honrada.
VDD o VCC Pin de Energía. El procesador típicamente trabaja con +5v
AB0 a AB11 Pines del Bus de Direccionamiento. Son pines bidireccionales que permiten recibir las direcciones de los dispositivos a los cuales comunicarse (memorias, otros chip en la placa, registros de I/O, etc). Al ser un bus de 12 bits direcciona hasta 4096 bytes o desde $0000 hasta $1000
VSS Pin de Ground, este pin se conecta al common ground del diseño.
DB0 a DB7 Pines del Bus de datos, Este es un bus bidireccional que permite recibir y escribir datos junto con el bit de R/W a memorias y registros de I/O
R/W Pin de Lectura/Escritura. Este pin indica si el procesador está realizando una lectura o una escritura. Cuando se encuentra en 1 o en estado High el procesador está realizando una lectura cuando está en 0 o estado Low una escritura.
PHI2 o 02 (OUT) Pin de Salida de Reloj, el mismos es una salida de reloj para conectar a otros dispositivos
/RES Pin de reset, este pin sirve para realizar un reset del procesador cuando se conecte a 0v. El reset tomará 7 ciclos de reloj y buscará en las posiciones de memoria FFFC y FFFD donde está el vector (otra posición de memoria) que posee la primera instrucción a ejecutar. El reset debe ser mantenido en 0v por lo menos durante dos ciclos de reloj para que sea reconocido
Conectando al 6502 y al 6510
Para poder ver visualmente como es el esquema de conexión de pines de ambos procesadores les dejo un video donde vamos a repasar para que sirve cada pin y como conectarlo a un breadboard para en futuros videos poder programar ambos procesadores.
6502 vs 6510 Chip pin out – Parte 2
Artículos en la serie C64 a Fondo
A continuación el link al próximos artículo en la serie
Parte 3 – Codeando a Mano la Primera Instrucción de Código Máquina
y aquí los links a los artículos anteriores
Referencias
A continuación les dejo algunos links donde profundizar el tema:
Video de la serie 6502 vs 6510 Parte 2 – Pin Out
6502 vs 6510 Chip pin out – Parte 2
Todos los ejemplos de código de los videos los pueden encontrar en:
https://github.com/carlinhocr/6502_vs_6510
Y como siempre la serie de Ben Eater del 6502